При движении звена различные его точки в общем случае имеют различные
ускорения. По принципу Даламбера к каждой точке звена, обладающей элементарной
массой dm, следует приложить элементарную силу инерции ![]() , где а – ускорение
массы dm. Так как звено имеет множество точек, то и сил инерции,
действующих на звено, – множество. На практике при расчете самого звена на
прочность ограничиваются конечным числом сил инерции, которые сосредотачивают в
центрах тяжести. В дальнейшем обычно эти силы приводят к центру масс S
звена. В результате на центр масс звена действует результирующая сила инерции
(главный вектор инерции), называемая силой инерции FИ,
и главный момент сил инерции звена (момент пары сил инерции) МИ.
Сила инерции FИ и момент пары сил инерции МИ
определяются по формулам соответственно:
, где а – ускорение
массы dm. Так как звено имеет множество точек, то и сил инерции,
действующих на звено, – множество. На практике при расчете самого звена на
прочность ограничиваются конечным числом сил инерции, которые сосредотачивают в
центрах тяжести. В дальнейшем обычно эти силы приводят к центру масс S
звена. В результате на центр масс звена действует результирующая сила инерции
(главный вектор инерции), называемая силой инерции FИ,
и главный момент сил инерции звена (момент пары сил инерции) МИ.
Сила инерции FИ и момент пары сил инерции МИ
определяются по формулам соответственно:
где m – масса звена; аS – вектор ускорения центра масс; JS – момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения; e – угловое ускорение звена. Знак минус показывает, что сила и момент инерции направлены противоположно ускорению.
Находим для исследуемого станка угловые ускорения звеньев и линейные ускорения центров масс звеньев в проекциях на оси координат.
Для начального звена в первом положении соответственно будем иметь
![]()
Для остальных звеньев ускорения центров масс и угловые ускорения находим по формулам, связывающими их с аналогами скоростей и ускорений, которые имеют следующий вид:
![]() ;
; ![]() ;
; ![]() . (3.1)
. (3.1)
Ускорение центра масс и угловое ускорение, например, второго звена, в соответствии с последними формулами (4.1) определится:
![]()
![]() ;
;![]() .
.
Результаты расчета ускорений других звеньев механизма по формулам (3.1) приведены в табл. 3.1.
Таблица 3.1.
Ускорения центров масс и угловые ускорения звеньев.
|
e1, 1/с2 |
aS2x м/c2 |
aS2y, м/c2 |
e2, 1/c2 |
aS4x м/c2 |
aS4y, м/c2 |
e4, 1/c2 |
e5, 1/c2 |
|
0,000018 |
-0,0202 |
0,028 |
0,0522 |
0.0162 |
0.0019 |
0.00249 |
0.04369 |
Определив ускорения звеньев, находим главный вектор и главный момент сил инерции звеньев механизма. Тогда соответственно главный вектор сил инерции и главный инерционный момент звеньев механизма определится:
Для звена 1 
Для звена 2 
Для звена 4 
Для звена 5 
3.1.2. Силы, действующие на механизм.
Для удобства дальнейшей работы в табл. 3.2 сведены все действующие на механизм силы и моменты в проекциях на оси координат со своими знаками.
Силы и моменты, действующие на механизм.
Таблица 3.2
|
Сила веса, Н |
Силы инерции, Н |
Моменты сил инерции, Н×м |
||||||||||||
|
Мc, |
F2y |
F3y |
F4y |
F5y |
FИ2x |
FИ2y |
FИ4x |
FИ4y |
FИ3x |
МИ1 |
МИ2 |
МИ4 |
МИ5 |
|
|
30 |
-29,43 |
0 |
-147,15 |
-29,43 |
0,060738 |
-0,0854 |
-0,2434 |
-0,0298 |
0 |
0 |
-0,0017 |
-0,000778 |
-0,0022 |
|
Так как направления сил и моментов учтены их знаками, то на расчетных схемах все силы изображаем в направлении координатных осей, а моменты – против хода часовой стрелки.
3.2. Определение уравновешивающего момента и реакции в кинетических парах аналитическим методом
3.2.1.Силовой анализ структурной группы 4-5.
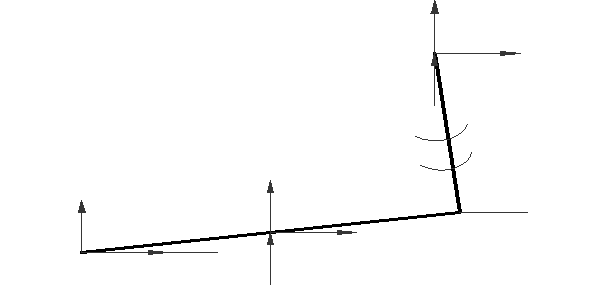 Рисуем структурную группу 4-5 (рис. 3.1). прикладываем к ней с целью
упрощения вычислений в проекциях на оси действующие на нее силы. Действие на
звено 5 со стороны стойкой 0 заменяем реакциями R50x и R50y, а на звено 4 со стороны звена 3 – реакциями R43x и R43y.
Записываем в проекциях на оси координат условия равновесия всех сил,
действующих на звенья 4 и 5:
Рисуем структурную группу 4-5 (рис. 3.1). прикладываем к ней с целью
упрощения вычислений в проекциях на оси действующие на нее силы. Действие на
звено 5 со стороны стойкой 0 заменяем реакциями R50x и R50y, а на звено 4 со стороны звена 3 – реакциями R43x и R43y.
Записываем в проекциях на оси координат условия равновесия всех сил,
действующих на звенья 4 и 5:
Рис. 3.1. Силовой анализ структурной группы 4-5 аналитическим методом.
1. ![]() ,
,
![]() ,
,
2. Находим сумму моментов относительно точки Е для звена 4
 ,
,
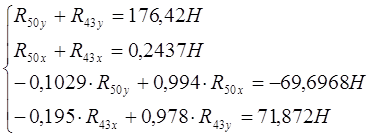
3. Находим сумму моментов относительно точки D для звена 5

Переносим все известные величины вправо и подставим численные значения и получим:
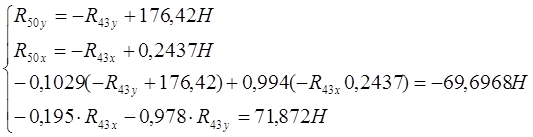
Решая систему уравнений, находим:
![]()
![]()
4. Записываем в проекциях на оси координат условия равновесия всех сил, действующих в шарнире Е:
![]() , откуда
, откуда
![]() .
.
![]() , откуда
, откуда
![]() .
.
![]()
3.2.2. Силовой анализ структурной группы 2–3.

1. ![]() ,
,
![]() ,
,
2. Находим сумму моментов относительно точки В для звена 3
 ,
,
3. Находим сумму моментов относительно точки В для звена 2

Переносим все известные величины вправо и подставим численные значения и получим:
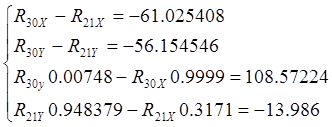
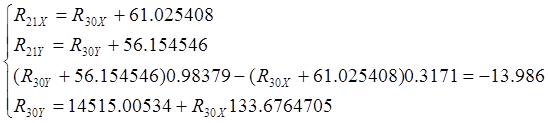
Решая систему находим:
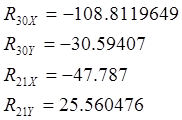
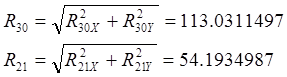
Записываем в проекциях на оси координат условия равновесия всех сил, действующих в шарнире В:
![]()
3.2.4. Определение уравновешивающего момента My и реакции R10 в кинематической паре 0 - 1.
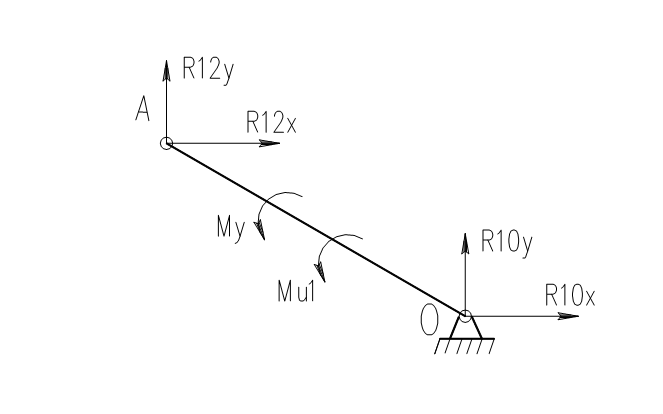 |
Рис.3.3
Для этого составляем уравнения равновесия начального звена механизма. (рис. 3.3). Эти уравнения имеют следующий вид:
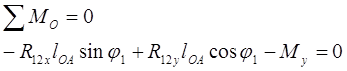
где
![]() ,
, ![]() ;
;
![]() ,
, ![]() –
проекции на оси координат реакции на звено 1 стойки 0;
–
проекции на оси координат реакции на звено 1 стойки 0;
![]() – длина первого звена;
– длина первого звена; ![]() – уравновешивающий момент.
– уравновешивающий момент.
Решая записанные выше уравнения, найдем
![]()
![]()
![]()
Полная реакция в опоре О1 будет определяться следующим образом:
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.