

Ниже приведена таблица аналогов скоростей звеньев для 13 положений
Таблица 2.5
|
Величина |
j2| |
j3| |
j5| |
j6| |
|
1 |
0,250 |
0,000 |
0,000 |
0,000 |
|
2 |
0,218 |
0,275 |
0,036 |
0,220 |
|
3 |
0,097 |
0,444 |
0,051 |
0,361 |
|
4 |
-0,074 |
0,482 |
0,045 |
0,395 |
|
5 |
-0,224 |
0,423 |
0,030 |
0,346 |
|
6 |
-0,301 |
0,290 |
0,014 |
0,234 |
|
7 |
-0,271 |
0,062 |
0,002 |
0,049 |
|
13 |
-0,250 |
0,000 |
0,000 |
0,000 |
|
8 |
-0,144 |
-0,242 |
-0,011 |
-0,194 |
|
9 |
-0,009 |
-0,469 |
-0,031 |
-0,383 |
|
10 |
0,086 |
-0,534 |
-0,049 |
-0,438 |
|
11 |
0,156 |
-0,457 |
-0,052 |
-0,372 |
|
12 |
0,216 |
-0,274 |
-0,036 |
-0,220 |
Рассчитываем аналоги скорости центров масс. Для этого продифференцируем уравнения координат центров масс:
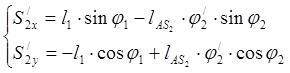 (2.22)
(2.22)
 (2.22)
(2.22)
Ниже приведена таблица аналогов скоростей центров масс для 13 положений
Таблица 2.6
|
Величина |
S/2X |
S/4X |
S/2Y |
S/4y |
|
1 |
0,015 |
0,000 |
-0,058 |
0,000 |
|
2 |
-0,049 |
-0,081 |
-0,066 |
-0,032 |
|
3 |
-0,094 |
-0,126 |
-0,063 |
-0,066 |
|
4 |
-0,109 |
-0,125 |
-0,047 |
-0,092 |
|
5 |
-0,098 |
-0,097 |
-0,019 |
-0,095 |
|
6 |
-0,066 |
-0,059 |
0,015 |
-0,072 |
|
7 |
-0,020 |
-0,011 |
0,052 |
-0,016 |
|
13 |
-0,009 |
0,000 |
0,059 |
0,000 |
|
8 |
0,035 |
0,047 |
0,081 |
0,061 |
|
9 |
0,085 |
0,105 |
0,082 |
0,109 |
|
10 |
0,114 |
0,138 |
0,051 |
0,103 |
|
11 |
0,111 |
0,129 |
0,005 |
0,069 |
|
12 |
0,075 |
0,081 |
-0,034 |
0,032 |
Нахождение ускорений аналитическим способом.
Для нахождения аналогов ускорений рассмотрим те же контура, что и при нахождении аналогов скоростей.
Продифференцируем систему уравнений (2.3) для первого контура по обобщенной координате дважды (учитывая что j1|,=-1) получим:
|
-l1cos(j1)- l2j2//sin(j2)- l2/(j2|)2cos(j2)-l3j3//sin(j3)-l3(j3/)2cos(j3)=0 |
(2.23) |
|
-l1sin(j1)+ l2j2//cos(j2)- l2/(j2/)2sin(j2)+l3j3//cos(j3)-l3(j3/)2sin(j3)=0 |
вычитаем j3
Упростим систему уравнений подставив известные значения.


Продифференцируем дважды систему уравнений (2.4) для второго контура учитывая что, j3 =j4 , получим:
|
-l4j4//sin(j4)+ l4(j4/)2cos(j4)- l5j5//sin(j5)+l5(j5/)2cos(j5)-l6j6//sin(j6)-l6(j6/)2cos(j6)=0 |
(2.24) |
|
l4j4//cos(j4)- l4(j4/)2sin(j4)+ l5j5//cos(j5)-l5(j5/)2sin(j5)+l6j6//cos(j6)-l6(j6/)2sin(j6)=0 |
|


Ниже приведена таблица аналогов ускорений звеньев для 13 положений
Таблица 2.7
|
Величина |
j2|| |
j3|| |
j5|| |
j6|| |
|
1 |
0,02 |
0,60 |
0,08 |
0,48 |
|
2 |
-0,16 |
0,48 |
0,06 |
0,39 |
|
3 |
-0,33 |
0,20 |
0,01 |
0,18 |
|
4 |
-0,37 |
-0,02 |
-0,02 |
0,00 |
|
5 |
-0,27 |
-0,12 |
-0,02 |
-0,10 |
|
6 |
-0,09 |
-0,23 |
-0,02 |
-0,19 |
|
7 |
0,14 |
-0,46 |
-0,02 |
-0,37 |
|
13 |
0,18 |
-0,51 |
-0,02 |
-0,41 |
|
8 |
0,26 |
-0,52 |
-0,03 |
-0,42 |
|
9 |
0,17 |
-0,22 |
-0,03 |
-0,18 |
|
10 |
0,10 |
0,07 |
-0,01 |
0,07 |
|
11 |
0,09 |
0,29 |
0,02 |
0,26 |
|
12 |
0,09 |
0,49 |
0,06 |
0,40 |
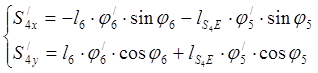
Рассчитываем аналоги ускорений центров масс. Для этого продифференцируем уравнения которые мы получили при нахождении аналогов скоростей центров масс.
 (2.25)
(2.25)
 (2.26)
(2.26)
Ниже приведена таблица аналогов ускорений центров масс для 13 положений
Таблица 2.8
|
Величина |
S//2X |
S//2Y |
S//4X |
S//4Y |
|
1 |
-0,13 |
-0,03 |
-0,18 |
-0,06 |
|
2 |
-0,11 |
-0,01 |
-0,13 |
-0,07 |
|
3 |
-0,06 |
0,01 |
-0,03 |
-0,08 |
|
4 |
0,00 |
0,03 |
0,04 |
-0,05 |
|
5 |
0,04 |
0,05 |
0,06 |
-0,01 |
|
6 |
0,07 |
0,06 |
0,07 |
0,04 |
|
7 |
0,09 |
0,06 |
0,09 |
0,12 |
|
13 |
0,10 |
0,06 |
0,10 |
0,13 |
|
8 |
0,10 |
0,03 |
0,11 |
0,12 |
|
9 |
0,08 |
-0,04 |
0,09 |
0,01 |
|
10 |
0,03 |
-0,09 |
0,03 |
-0,08 |
|
11 |
-0,04 |
-0,10 |
-0,06 |
-0,10 |
|
12 |
-0,10 |
-0,07 |
-0,14 |
-0,08 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.