2.2 Построение планов скоростей и ускорений
Построим план скоростей для третьего положения механизма комбайна при j1=314,6790. Так как аналоги скоростей не зависят и ускорений не зависят от закона изменения обобщенной координаты, принимаем w1=-1рад/с.
1) Находим скорость точки
А: ![]()
2) Из полюса плана скоростей p – откладываем отрезок pb=50 мм, изображающий вектор скорости точки А;
3) Для определения скорости точки B раскладываем плоскопараллельное движение звена 2 на переносное (поступательное) вместе с точкой А и относительное (вращательное) вокруг точки А. С другой стороны, точка B находится в относительном движении вокруг неподвижной точки О. Поэтому
 (2.27)
(2.27)
Это уравнение решаем графически. Через точку А проводим линию, перпендикулярную АВ, а через полюс pv – линию, перпендикулярную BO, до их пересечения в точке С0 .
5) Скорость точки D3 звена 3 определяем, используя теорему подобия


Отрезок pd отложим от полюса p на продолжении вектора pb.
6) Для определения скорости точки E раскладываем плоскопараллельное движение звена 4 на переносное (поступательное) вместе с точкой D и относительное (вращательное) вокруг точки D. С другой стороны, точка С находится в относительном движении вокруг неподвижной точки О2. Поэтому
 (2.28)
(2.28)
Это уравнение решаем графически.
7) Из плана скоростей находим:






 ,
,  ,
,
 ,
, 
В ниже приведенной таблице сравниваем значения аналогов скоростей, полученные графическим и аналитическим методами.
Таблица 2.9
|
Величина |
j/2 |
j/3 |
j/5 |
j/6 |
S/2X |
S/2Y |
S/4X |
S/4Y |
|
Графически |
0,093 |
0,442 |
0,050 |
0,360 |
- |
- |
- |
- |
|
Аналитически |
0,097 |
0,444 |
0,051 |
0,361 |
-0,094 |
-0,063 |
-0,126 |
-0,066 |
|
D % |
2,1837 |
0,3984 |
0,3739 |
0,266 |
- |
- |
- |
- |
Построим план ускорений для третьего положения механизма комбайна при j1=314,6790. Так как аналоги скоростей не зависят и ускорений не зависят от закона изменения обобщенной координаты, принимаем w1=-1рад/с.
1) Определяем
ускорение точки А. Полное ускорение точки А равно нормальной составляющей ![]() , которая направлена по линии О1А
к центру О1.
, которая направлена по линии О1А
к центру О1.

2) Из точки p – полюса плана ускорений – откладываем вектор, изображающий ускорение точки А, в виде отрезка pа= 75мм.
3) подсчитываем масштабный коэффициент ускорений:
4) Для определения ускорения точки В записываем два векторных уравнения, рассматривая движения этой точки вначале со вторым звеном, а затем с третьим:
 ,
,
 .
.
Нормальные ускорения вычисляем по формулам:
![]()

![]()

![]()
Отрезки, изображающие в миллиметрах векторы этих ускорений, равны:
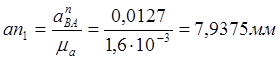 ,
,
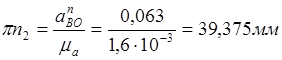 .
.
Вектор ![]() направлен вдоль
линии АВ от точки В к точке А, а вектор
направлен вдоль
линии АВ от точки В к точке А, а вектор ![]() по
линии ВО от В к точке О.
по
линии ВО от В к точке О.
5) Для определения ускорения точки D звена 3 используем теорему подобия:

Отрезок pd3 откладываем на продолжении отрезка pb
6) Для определения ускорения точки Е записываем два векторных уравнения, рассматривая движения этой точки вначале с пятым звеном, а затем с шестым:
 ,
,
 .
.
Нормальные ускорения вычисляем по формулам:
![]()

![]()

![]()
Отрезки, изображающие в миллиметрах векторы этих ускорений, равны:
 ,
,
 .
.
Вектор ![]() направлен вдоль
линии ED от точки E к точке D, а вектор
направлен вдоль
линии ED от точки E к точке D, а вектор ![]() по линии EO2
от E к точке О2.
по линии EO2
от E к точке О2.
7) Из плана ускорений находим:




 ,
,  ,
,
 ,
, 
В ниже приведенной таблице сравниваем значения аналогов ускорений, полученные графическим и аналитическим методами.
Таблица 2.10
|
Величина |
j//2 |
j//3 |
j//5 |
j//6 |
S/2X |
S/2Y |
S/4X |
S/4Y |
|
Графически |
0,33 |
0,18 |
0,011 |
0,179 |
- |
- |
- |
- |
|
Аналитически |
-0,33 |
0,20 |
0,01 |
0,18 |
-0,06 |
0,01 |
-0,03 |
-0,08 |
|
D % |
0 |
3,6145 |
-0,9901 |
0,7228 |
- |
- |
- |
- |
3. Силовой анализ механизмов.
Силовой анализ механизмов проводиться для того, чтобы в последствии по найденным силам (моментам) произвести расчет на прочность элементов кинематических пар и звеньев механизма, а также правильно подобрать привод.
При силовом исследовании механизма на первом этапе силами трения в кинематических парах пренебрегают, так как они часто невелики по сравнению с другими силами, действующими на механизм.
Силовой анализ механизма проводят как аналитическими, так и графическими методами в соответствии со следующим алгоритмом:
1. определяют силы инерции звеньев;
2. выделяют структурные группы Ассура;
3. начиная с последней структурной группы, в которую входит выходное звено, последовательно определяют реакции во всех кинематических парах;
4. из условий равновесия начального звена находят уравновешивающий момент и реакцию, действующую на него со стороны стойки.
Силовой анализ механизмов в курсовом проекте выполняется аналитическим методом только для исследуемого (то есть для первого (j1 = 50°)) положения.
3.1. Определение сил, действующих на механизм.
3.1.1. Определение сил инерции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.