2. Структурный анализ кривош
ипно-ползунного механизма2.1. Структурная схема механизма
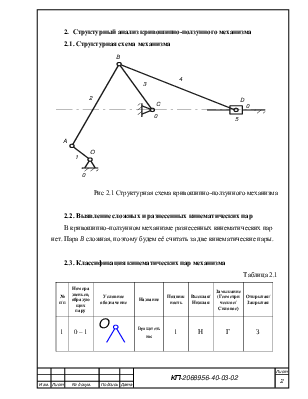
Рис 2.1 Структурная схема кривошипно-ползунного механизма
2.2. Выявление сложных и разнесенных кинематических пар
В кривошипно-ползунном механизме разнесенных кинематических пар нет. Пара В сложная, поэтому будем её считать за две кинематические пары.
2.3. Классификация кинематических пар механизма
Таблица 2.1
|
№ п/п |
Номера звеньев, образующих пару |
Условное обозначение |
Название |
Подвижность |
Высшая/ Низшая |
Замыкание (Геометрическое/ Силовое) |
Открытая/ Закрытая |
|
1 |
0 – 1 |
|
Вращательная |
1 |
Н |
Г |
З |
|
2 |
1 – 2 |
|
Вращательная |
1 |
Н |
Г |
З |
|
3 |
2 – 3 |
|
Вращательная |
1 |
Н |
Г |
З |
|
4 |
3 – 0 |
|
Вращательная |
1 |
Н |
Г |
З |
|
5 |
3 – 4 |
|
Вращательная |
1 |
Н |
Г |
З |
|
6 |
4 – 5 |
|
Вращательная |
1 |
Н |
Г |
З |
|
7 |
5 – 0 |
|
Поступательная |
1 |
Н |
Г |
З |
Исследуемый механизм состоит только из одноподвижных кинематических пар (р1 = 7, р = 7), где р1 – число одноподвижных кинематических пар в механизме, р - общее число кинематических пар в механизме.
2. 4. Классификация звеньев механизма
Таблица 2.2
|
№ п/п |
Номера звена |
Условное обозначение |
Название |
Движение |
Число вершин |
|
1 |
0 |
|
Стойка |
Отсутствует |
- |
|
2 |
1 |
|
Кривошип |
Вращательное |
2 |
|
3 |
2 |
|
Шатун |
Сложное |
2 |
|
4 |
3 |
|
Кулиса |
Вращательное |
3 |
|
5 |
4 |
|
Шатун |
Сложное |
2 |
|
6 |
5 |
|
Ползун |
Поступательное |
2 |
Механизм имеет:
четыре (![]() ) двухвершинных (
) двухвершинных (![]() ) линейных звена 1,2,4,5; одно (n3=1)
трёх вершинное звено, которое является базовым звено
) линейных звена 1,2,4,5; одно (n3=1)
трёх вершинное звено, которое является базовым звено ![]() ;
пять (
;
пять (![]() ) подвижных звеньев.
) подвижных звеньев.
звеньев.
Находим число
присоединений к стойке. Механизм конвейера имеет три (![]() )
присоединения к стойке.
)
присоединения к стойке.
В исследуемом сложном механизме можно выделить один элементарный механизм
Рис. 2.2. Элементарный механизм
 и два простых, один из которых
является шарнирным четырехзвенником,
и два простых, один из которых
является шарнирным четырехзвенником,
Рис. 2.3. Шарнирный четырехзвенник
а второй является кривошипно-ползунным механизмом
 |
Механизмов с разомкнутыми кинематическими цепями в исследуемом кривошипно-ползунном механизме нет.
Механизм имеет в своем составе только простые стационарные механизмы.
В исследуемом
механизме звеньев закрепления нет. Звено 3 одновременно входит в два простых
механизма – шарнирный четыхзвенник и кривошипно-ползунный. Значит, для этого
звена ![]()
Классифицируем механизм. Исследуемый механизм имеет постоянную структуру, является сложным и однотипным. Он состоит из одного элементарного механизма и двух стационарных простых, которые имеют в своем составе только замкнутые кинематические цепи.
Механизм
существует в трехподвижном пространстве ![]() .
.
Формулы для определения подвижности этих механизмов примут вид соответственно:
Определим
подвижность шарнирного четырехзвенника. Этот механизм имеет: три (![]() ) подвижных звена 1,2,3; четыре (
) подвижных звена 1,2,3; четыре (![]() ) одноподвижные кинематические пары
O, A, B, C.
) одноподвижные кинематические пары
O, A, B, C.
![]()
Найдем
подвижность кривошипно-ползуного механизма. Он имеет: (![]() )
подвижных звена 3,4,5 и четыре (
)
подвижных звена 3,4,5 и четыре (![]() ) кинематические
пары C, B, D, K. Подвижность его определяется аналогично:
) кинематические
пары C, B, D, K. Подвижность его определяется аналогично:
![]()
Определяем подвижность сложного механизма по формуле:
![]()
Проводим анализ
структурной модели механизма станка. Проверяем, соответствует ли исследуемый
механизм структурой математической модели. Механизм имеет: семь (![]() ) одноподвижных кинематических пар;
пять (
) одноподвижных кинематических пар;
пять (![]() ) подвижных двухвершинных (
) подвижных двухвершинных (![]() ) звена, базовым является
) звена, базовым является ![]() ; три присоединения к стойке (
; три присоединения к стойке (![]() ) и нет звеньев закрепления (
) и нет звеньев закрепления (![]() ).
).
Математическая модель:
![]()
 ;
;
 ;
;
 ;
;
![]() ;
;
 .
.
Получим:
![]()
![]()
![]()
![]()
![]()
![]()
Так как уравнения модели превратились в тождества, то исследуемое устройство имеет правильную структуру и является механизмом.
Выделим и проведем классификацию структурных групп. Элементарный механизм условно отнесен к механизму I класса.
 |
|||
 |
|||
Класс структурной группы определяется числом кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами. Порядок группы определяется числом внешних кинематических пар. Вид группы определяется в зависимости от места размещения на ней вращательных и поступательных кинематических пар.
|
№ |
Структурная схема |
Номера звеньев |
Класс, порядок, вид |
||
|
|
0-1 |
1 класс |
|||
|
|
2-3 |
II класс 2-порядок 1-вид |
|||
|
3 |
|
4-5 |
II класс 2-порядок 1-вид |
Видно, что
выделенные структурные группы полностью подобны по видовому и количественному
составу звеньев и кинематических пар. Каждая из структурных групп имеет: два
подвижных звена (![]() ), причем звенья
двухвершинные (
), причем звенья
двухвершинные (![]() ) и, значит, базовое звено
также имеет две вершины (
) и, значит, базовое звено
также имеет две вершины (![]() ); три (
); три (![]() ) одноподвижные кинематические пары,
из которых две внешние (
) одноподвижные кинематические пары,
из которых две внешние (![]() ).
).
Проверяем, соответствуют ли выделенные структурные группы математическим моделям. Так как группы подобны, то проверку выполняем только по одной группе, например, OAB. Математические модели структурных групп имеют вид:
![]()

где j = 0, 1, 2,… - целочисленный индекс; n¢ - общее число звеньев в структурной группе; nt¢ - число t – вершинных звеньев в группе; S¢ - число внешних кинематических пар, которыми группа присоединяется к механизму и стойке; T - звено структурной группы, у которого наибольшее число вершин.
Для обеих структурных групп:
![]()
![]()
![]()
![]()
Анализ полученных выражений показывает, что выделенные кинематические цепи являются структурными группами Ассура.
Кривошипно-ползунный механизм относится ко II классу.
3. Кинематический анализ механизма
Кинематический анализ любого механизма состоит в определении: крайних (мертвых) положений станка, включая и определение траекторий отдельных точек; скоростей и ускорений характерных точек звеньев по известному закону движения начального звена (обобщенной координаты).
3.1 Определение крайних (мертвых) положений механизма
Крайние (мертвые) положения механизма можно определить аналитически или графически. Так как аналитика дает более высокую точность, то при определении крайних положений ей отдается предпочтение.
Для кривошипно-ползунного и шарнирного
кривошипно-коромыслового четырехзвенника крайними будут такие положения, когда
кривошип и шатун то вытягиваются (![]() ), то
складываются (
), то
складываются ( ![]() ) в одну линию.
) в одну линию.
Рис. 3.1 Определение крайних положений механизма.
3.2 Определение положений звеньев механизма графическим способом.
 |
3.3 Определение положений звеньев и точек механизма аналитическим методом.
Применим метод замкнутых контуров. Со звеньями механизма связываем вектора так, чтобы их последовательность образовывала замкнутые контура как показано на рис. 3.3.
 |
Рис. 3.3 Построение замкнутых векторных контуров.
Структурную схему механизма располагаем в прямоугольной системе координат, начало которой помещаем в точку O. Со звеньями механизма векторы связываем так, чтобы их последовательность два замкнутых контура: OABCO и CBDC.
Представим уравнение в проекциях на оси координат:
![]()
![]()
 (3.2)
(3.2)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.






 1
1
 2
2