


Mikhail А. Gorkavy
Department of Control and Informatics in technical systems
Komsomolsk-on-Amur State Technical University,
Lenina av. 27, Komsomolsk-on-Amur, 681013, RUSSIA
Tel: +8(4217)531327. E-mail: mix_komsa@mail.ru
Abstract
This paper discusses extra possibilities of observing devices, operating in structure of closed-loop determined systems with a modal regulator. Usually observers are considered to be devices for estimating immeasurable state variables. In certain situations they can give invariant properties to system with modal regulator when external uncontrolled influence is applied. The equations given below explains the original properties
An example of control system synthesis and research for the 4-order state object gives practical explanation about system invariant properties. These invariant properties appear due to observer structure.
This work doesn’t give common approach for forming special observer structures. It only shows the possibility of determining such structures for concrete projecting systems.
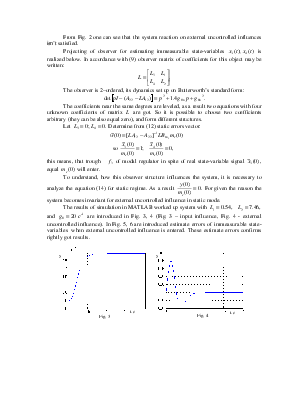
Control systems with modal regulators [1, 2, 3] possess necessary properties for input influence. But the reaction of such systems on external uncontrolled influences almost isn’t satisfactory. These reactions are usually characterized by considerable dynamic and static errors. Using observers for estimating immeasurable state variables results in system reaction more unpredictable. It is caused by existence estimate errors of state variables.
In one case an additional integrator to remove unsatisfied static errors is put into a system. I.e. system with modal PI-regulator [2] is created. In another case an invariant canal for estimated external uncontrolled influence is formed. Estimation is carried out by expended observer [1]. Above mentioned actions have some advantages and disadvantages in certain situations. But in any case additional integrators appear in the system, it increases the closed-loop system order.
Let’s consider a control system model with modal regulator. Designations are used below accepted in [3]. Equation of object may be written as:
![]() (1)
(1)
![]() (2)
(2)
Where ![]() - state
vector;
- state
vector; ![]() - control signal
vector;
- control signal
vector; ![]() - vector of
external unknown influences,
- vector of
external unknown influences, ![]() - output
vector.
- output
vector. ![]() - matrixes of object,
input, output, external influence.
- matrixes of object,
input, output, external influence.
The equation of regulator may be written as:
![]() (3)
(3)
![]() (4)
(4)
Where ![]() - input
vector;
- input
vector; ![]() - output regulator
vector,
- output regulator
vector, ![]() - coefficient
regulator matrix. Without input influence
- coefficient
regulator matrix. Without input influence ![]() there is
there is ![]() - modal
control law.
- modal
control law.
Equation of closed-loop system may be written as:
![]() (5)
(5)
![]() (6)
(6)
(5) shows, that the influence isn’t controlled.
Let as assume in object (1) ![]() measurable state-variables, that make vector
measurable state-variables, that make vector ![]() , and (
, and (![]() ) immeasurable state-variables,
that form vector
) immeasurable state-variables,
that form vector ![]() . Then state
vector is
. Then state
vector is ![]() .
.
According to Luenberger’s method of projecting reduce-order observers
[3], the object can be divided into two sub objects ![]() ,
, ![]() :
:
![]() (7)
(7)
![]() . (8)
. (8)
Then the observer equation may be written as:
![]() (9)
(9)
where ![]() - an
- an ![]() observer’s matrix, that is
chosen according to equality characteristic observer equation with standard characteristic
form [3]. If
observer’s matrix, that is
chosen according to equality characteristic observer equation with standard characteristic
form [3]. If ![]() , in matrix
, in matrix ![]() there will be some coefficient
superfluity for setting observer at necessary quickness. Due to arbitrary choice
of matrix
there will be some coefficient
superfluity for setting observer at necessary quickness. Due to arbitrary choice
of matrix ![]() coefficients it
is possible to form different observer structures to achieve determine aims.
For example for forming estimate errors to compensate external uncontrolled influence
on the system.
coefficients it
is possible to form different observer structures to achieve determine aims.
For example for forming estimate errors to compensate external uncontrolled influence
on the system.
If we subtract equation (9) from equation (8), we’ll receive equation for immeasurable state-variable estimate errors from external uncontrolled influence:
![]() (10)
(10)
where ![]() (11)
(11)
or in operator for:
![]() (12)
(12)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.