направление и величина), который подчиняется общему правилу пересчета положения любой геометрической точки при переходе к другой точке отсчета.
2. Пусть ![]() — система отсчета.
Тогда координаты центра масс в этой системе, как следует из (1),
задаются соотношениями:
— система отсчета.
Тогда координаты центра масс в этой системе, как следует из (1),
задаются соотношениями:
![]() =
=![]()
 ,
, ![]() =
=![]()
 ,
, ![]() =
=![]()
 .
.
3. Пусть ![]() — система отсчета с
полюсом в точке
— система отсчета с
полюсом в точке ![]() ,
, ![]() — матрица перехода от системы
— матрица перехода от системы ![]() к
системе
к
системе ![]() ,
, ![]() ,
, ![]() ,
, ![]() — координаты точки
— координаты точки ![]() в системе
в системе ![]() ,
, ![]() ,
, ![]() ,
, ![]() —
координаты центра масс в системе
—
координаты центра масс в системе ![]() . Тогда справедливы соотношения
. Тогда справедливы соотношения
 =
= +
+![]()
 ,
,
![]() =
=![]()
 ,
, ![]() =
=![]()
 ,
, ![]() =
=![]()
 .
.
4. Если точки ![]() неподвижны
в системе
неподвижны
в системе ![]() , то при движении механической системы
координаты
, то при движении механической системы
координаты ![]() ,
, ![]() ,
, ![]() этих
точек будут оставаться постоянными. А тогда, согласно (2), центр масс в
системе
этих
точек будут оставаться постоянными. А тогда, согласно (2), центр масс в
системе ![]() будет неподвижным.
будет неподвижным.
5. Если за полюс системы ![]() взять
точку
взять
точку ![]() , то
, то
![]()
![]() º
º![]()

![]()
при любых движениях механической системы.
2º. Момент инерции относительно оси.
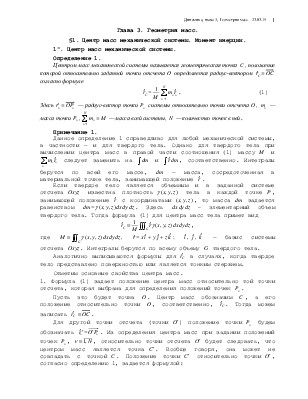
Пусть задана ось ![]() ,
проходящая через точку отсчета
,
проходящая через точку отсчета ![]() ;
; ![]() =
=![]() — радиус-вектор точки
— радиус-вектор точки ![]() механической системы относительно точки отсчета
механической системы относительно точки отсчета
![]() ,
, ![]() (см. рис.1).
(см. рис.1).
![]()
![]() Обозначим
Обозначим
![]()
![]()
![]() —
расстояние от точки
—
расстояние от точки ![]() до оси
до оси ![]() ,
,
![]()
![]() — масса точки
— масса точки ![]() ,
,
![]()
![]()
![]() — орт направляющего вектора оси
— орт направляющего вектора оси ![]() .
.
![]()
![]()
![]() Рис.1.
Рис.1.
Определение 2.
Моментом инерции точки ![]() относительно оси
относительно оси ![]() называется
величина
называется
величина ![]() , задаваемая формулой
, задаваемая формулой ![]() =
=![]() .
.
Определение 3.
Моментом инерции механической
системы относительно оси ![]() называется величина
называется величина![]() , задаваемая
формулой
, задаваемая
формулой
![]() =
= =
= . (5)
. (5)
Определение 4.
Величина  (6)
(6)
называется радиусоминерции
механической системы относительно оси ![]() .
.
Из (6) следует, что
![]() =
=![]() ,
,  .
.
Легко видеть (см. рис.1), что
![]() =
=![]()
![]()
![]() =
=![]() , или иначе,
, или иначе, ![]() =
=![]() .
.
Поэтому,
подставляя ![]() в правую часть равенства (5), получим
в правую часть равенства (5), получим
![]() =
=
![]() . (7)
. (7)
Примечание 2.
Если в качестве механической системы рассматривается твердое
тело, то все формулы, встречающиеся в этой и последующих главах, в которых
участвует масса ![]() материальной точки
материальной точки ![]() и применяется суммирование по
индексу
и применяется суммирование по
индексу ![]() , должны рассматриваться с заменой
, должны рассматриваться с заменой ![]() на элементарную массу
на элементарную массу ![]() , которая занимает в теле положение
, которая занимает в теле положение ![]() или в абсолютном пространстве
положение
или в абсолютном пространстве
положение ![]() .
.
После такой замены в этих формулах суммирование
по ![]() должно быть заменено интегрированием по
всей массе твердого тела. В частности, если известна плотность твердого тела,
то алгоритм замены подробно был описан выше в примечании 1 к
определению 1 на примере понятия центра масс.
должно быть заменено интегрированием по
всей массе твердого тела. В частности, если известна плотность твердого тела,
то алгоритм замены подробно был описан выше в примечании 1 к
определению 1 на примере понятия центра масс.
С учетом данного примечания в
дальнейшем не будем указывать в ![]() пределы изменения
индекса суммирования, имея в виду, что для механических систем с конечным
числом материальных точек он меняется от 1 до
пределы изменения
индекса суммирования, имея в виду, что для механических систем с конечным
числом материальных точек он меняется от 1 до ![]() , а для твердого
тела суммы заменяются интегралами.
, а для твердого
тела суммы заменяются интегралами.
Отметим свойства момента инерции относительно оси.
1.
![]() ,
, ![]() ,
т.е. момент инерции и радиус инерции — неотрицательные числа. Величины
,
т.е. момент инерции и радиус инерции — неотрицательные числа. Величины ![]()
![]() ,
, ![]()
![]() , тогда и только тогда, когда все точки механической системы
находятся на оси
, тогда и только тогда, когда все точки механической системы
находятся на оси ![]() .
.
2. Если в какой-либо системе координат при движении
механической системы расстояние от каждой материальной точки системы до оси не
изменяется, то момент инерции такой системы относительно этой оси остается
постоянным. В частности, для твердого тела — если ось ![]() неподвижна
в твердом теле, то
неподвижна
в твердом теле, то ![]() =
=![]() .
Следовательно, моменты инерции твердого тела относительно связанных осей
постоянны на любых его движениях.
.
Следовательно, моменты инерции твердого тела относительно связанных осей
постоянны на любых его движениях.
3. Дадим другое представление момента инерции ![]() в зависимости от направляющего орта
в зависимости от направляющего орта ![]() , отличающееся по форме от (7).
, отличающееся по форме от (7).
Пусть ось ![]() проходит через начало
координат в системе
проходит через начало
координат в системе ![]() . Обозначим
. Обозначим ![]() —
координаты точек механической системы,
—
координаты точек механической системы, ![]() — направляющие
косинусы орта
— направляющие
косинусы орта ![]() в этой системе координат.
в этой системе координат.
Обратимся к формуле (7). Запишем ее в алгебраической форме. Для этого обозначим
![]() =
=![]() ,
, ![]() =
=![]() .
.
Легко видеть, что
![]() =
=![]()
![]()
![]() ,
, ![]() =
=![]()
![]()
![]() .
.
Подставляя ![]() и
и ![]() в правую часть (7), будем иметь
в правую часть (7), будем иметь
![]() =
=![]()
![]()
![]()
![]()
![]() (
(![]() )(
)(![]() )].
)].
Заменим произведения ![]() и
и ![]()
![]() следующими
очевидными представлениями
следующими
очевидными представлениями
![]()
![]() ,
, ![]()
![]()
![]() .
.
В
них ![]() обозначает
единичную матрицу третьего порядка.
обозначает
единичную матрицу третьего порядка.
После подстановки их в ![]() придем
к выражению
придем
к выражению
![]() , которое
запишем в следующей форме
, которое
запишем в следующей форме
![]() =
=![]() , (8)
, (8)
где
![]() .
.
Отметим основные свойства матрицы ![]() .
.
1.
Матрица ![]() не зависит от координат орта
не зависит от координат орта ![]() , т.е. не зависит от выбора оси
, т.е. не зависит от выбора оси ![]() .
.
2. Значения элементов матрицы ![]() существенно зависят от того, в какой
системе координат задаются векторы
существенно зависят от того, в какой
системе координат задаются векторы ![]() . Иначе
говоря, матрица
. Иначе
говоря, матрица ![]() зависит от выбора системы
отсчета, в которой задаются координаты векторов
зависит от выбора системы
отсчета, в которой задаются координаты векторов ![]() .
.
3. Для вычисления момента инерции ![]() по формуле (8) необходимо, чтобы
элементы матрицы
по формуле (8) необходимо, чтобы
элементы матрицы ![]() и вектора
и вектора ![]() были заданы в одной и той же системе
координат, а ось
были заданы в одной и той же системе
координат, а ось ![]() проходила через точку
проходила через точку ![]() .
.
4. Момент инерции ![]() является квадратичной формой относительно
компонент вектора
является квадратичной формой относительно
компонент вектора ![]() . Матрица коэффициентов этой
квадратичной формы совпадает с матрицей
. Матрица коэффициентов этой
квадратичной формы совпадает с матрицей ![]() .
.
§2. Тензор инерции и его свойства.
Определение 1.
Матрица ![]() , определяемая по формуле
, определяемая по формуле
![]() (1)
(1)
и обладающая следующими свойствами:
1)
элементы
ее задаются в той системе координат с полюсом ![]() , в
которой определены координаты векторов
, в
которой определены координаты векторов ![]() ;
;
2) для нее справедливы операции линейной алгебры только в тех случаях
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.