Для кривошипно-ползунного механизма крайними будут такие положения (рис. 2.1), когда кривошип и шатун то вытягиваются (ОАкВк), то складываются в одну линию (AнОВн). Тогда φр и φх будут углами рабочего и холостого хода механизма, а углы φн и φк – начальным и конечным углами соответственно.
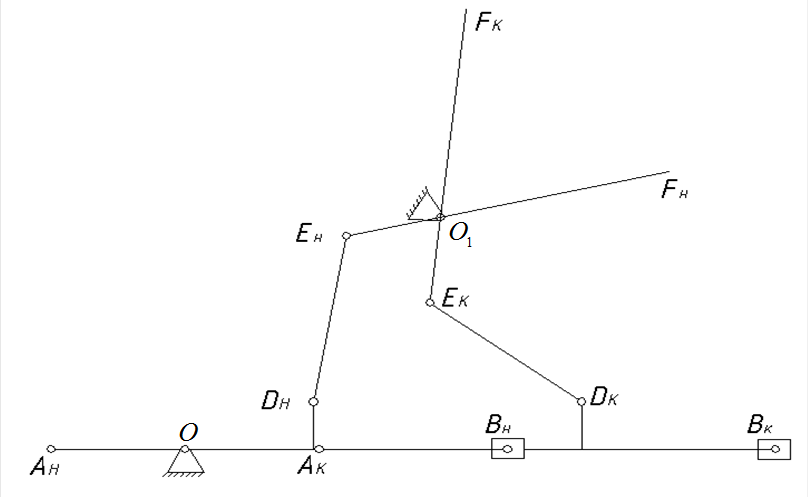
Рис. 2.1
Из построения видно:
Выбираем масштабный коэффициент длин m1 = 0,005 м/мм и рассчитываем чертежные размеры звеньев (табл. 2.1).
Таблица 2.1
Чертежные размеры звеньев
|
OA, мм |
AB, мм |
AD,мм |
DB, мм |
DE, мм |
EO1, мм |
O1F , мм |
X, мм |
Y, мм |
|
50 |
169,643 |
100 |
75 |
67,857 |
35,7 |
60,714 |
94,643 |
96,429 |
Строим план механизма (Приложение 1).
Будем находить кинематические характеристики методом Зиновьева (метод замкнутых векторных контуров).
Структурную схему механизма располагаем в прямоугольной системе координат, начало которой помещаем в точку O1. Рисуем структурную схему механизма в пятом положении (рис. 2.2).
Определяем угол j1:
![]()
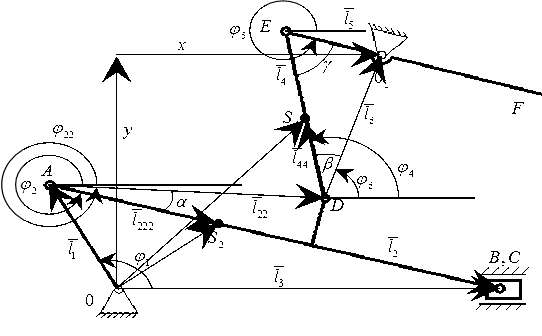
Рис. 2.2
Записываем уравнение замкнутости контура ОАВО в векторном виде:
![]() (2.1)
(2.1)
Уравнению (2.1) соответствуют два уравнения проекций на оси координат:
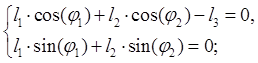 (2.2)
(2.2)
Решаем систему (2.2) :

Определим угол ![]() :
:
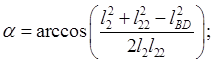
![]()
Записываем уравнение замкнутости контура OABDEO1O в векторном виде:
![]() (2.3)
(2.3)
Уравнению (2.3) соответствуют два уравнения проекций на оси координат:
 (2.4)
(2.4)
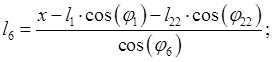
Для решения системы (2.4) введем вспомогательный вектор l6:
![]() (2.5)
(2.5)
Уравнению (2.5) соответствуют два уравнения проекций на оси координат:
 (2.6)
(2.6)
Решаем систему (2.6):

Определим угол ![]() :
:

Определим
угол ![]() :
:

Для нахождения положений точек S2 и S4 записываем уравнение замкнутости контуров ОАS2O и ОАDS4O:
![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
Из уравнений (2.9) и (2.10) находим координаты центров масс звеньев 3 и 2:
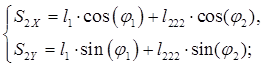 (2.9)
(2.9)
 (2.10)
(2.10)
Вычисления производим в MathCAD, результаты сводим в таблицу 2.2.
Все вычисленные по формулам величины сравниваем с соответствующими величинами, найденными из плана механизма. Результаты сравнения приведены в табл. 2.2.
Таблица 2.2
Результаты расчета положений звеньев
|
Величина |
j10 |
j20 |
j220 |
l3,м |
l6,м |
j60 |
j40 |
j50 |
|
Графически |
30 |
8,474 |
5,789 |
1,182 |
0,437 |
128,129 |
156,869 |
67,66 |
|
Аналитически |
30 |
8,474 |
5,789 |
1,182 |
0,437 |
128,129 |
156,869 |
67,66 |
|
Отклонение, D %
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Найдём аналоги скоростей и ускорений.
Так
как аналоги скоростей и ускорений не зависят от закона изменения обобщенной
координаты, принимаем ![]()
Дифференцируем по обобщенной координате уравнение (2.2)
 (2.11)
(2.11)
 ;
; ![]() ;
;
Вычисления производим в MathCAD, результаты сводим в таблицу 2.3.
После дифференцирования уравнения (2.4) получим:
 (2.12)
(2.12)
В
MathCAD решаем систему
(2.12) методом обратных матриц, находим ![]() и
и
![]() .
.
Аналоги скоростей центров масс звеньев 2 и 4 получаем в проекциях на оси координат, дифференцируя по обобщенной координате уравнения (2.9) и (2.10):
 (2.13)
(2.13)
 (2.14)
(2.14)
Вычисляем системы (2.18), (2.19) в MathCAD и результаты сводим в таблицу 2.3.
Аналитическое определение аналогов ускорений основано на дифференцировании по обобщенной координате уравнений (2.11), (2.12).
После дифференцирования уравнений (2.11) получим:
 (2.15)
(2.15)
В MathCADрешаем
систему (2.15), находим ![]() и
и![]() .
.
После дифференцирования уравнений (2.12) получим:
 (2.16)
(2.16)
В
MathCAD решаем систему
(2.1), находим ![]() и
и ![]() .
.
Аналоги ускорений центров масс звеньев 2 и 3 получаем в проекциях на оси координат, дифференцируя по обобщенной координате уравнения (2.13) и (2.14).
 (2.17)
(2.17)
 (2.18)
(2.18)
Вычисляем системы (2.17), (2.18) в MathCAD и результаты сводим в таблицу 2.4.
2.4.1. Определение аналогов скоростей исследуемого механизма графическим методом
Решение задачи графическим методом основано на построении плана скоростей для пятого положения механизма при j1 = 300 . Так как аналоги скоростей и ускорений не зависят от закона изменения обобщенной координаты, принимаем w1= -1 рад/с.
Построение плана скоростей:
1). находим скорость точки А:
![]()
2). из полюса плана скоростей p откладываем отрезок pa = 50 мм, изображающий вектор скорости точки А (рис. 2.3);
3). подсчитываем масштабный коэффициент скоростей:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.