![]() 3.1
Кинематическое исследование механизма аналитическим методом.
3.1
Кинематическое исследование механизма аналитическим методом.
Используем метод замкнутых векторных контуров для определения линейных и угловых координат, скоростей и ускорений точек звеньев механизма.
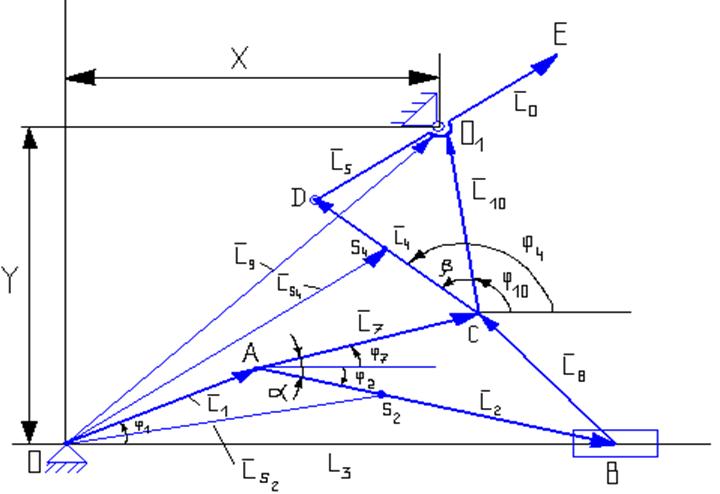
Записываем уравнение замкнутости первого контура ОАBО. Для этого обходим его периметр в направлении вектора L1,причем все векторы, совпадающие с направлением обхода, ставятся со знаком ''+'' и не совпадающие – со знаком '' - '' :
![]()
![]()
![]() (3.1)
(3.1)
Записываем уравнение для второго контура OACDO1O.
![]()
![]() (3.2)
(3.2)
![]()
![]() Представим
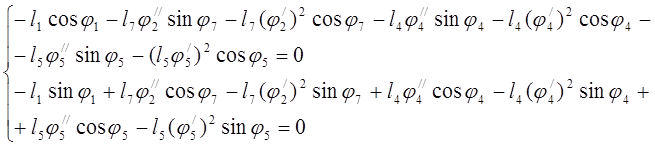
уравнение (3.1) в проекциях на оси координат:
Представим
уравнение (3.1) в проекциях на оси координат:
![]()
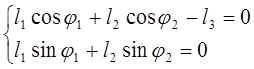 (3.3)
(3.3)
Из уравнений (3.3) находим
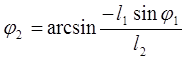 (3.4)
(3.4)
![]() (3.5)
(3.5)
Уравнение замкнутости второго контура в проекциях:
 (3.6)
(3.6)
Т.к. уравнение (3.6) сложны для
решения введём дополнительный вектор ![]() и запишем два
векторных уравнения:
и запишем два
векторных уравнения:
![]() (3.7)
(3.7)
![]() (3.8)
(3.8)
В проекциях (3.7):
 (3.9)
(3.9)
Из треугольника ACB
определяем угол ![]() :
:
 (3.10)
(3.10)
![]() (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)
(3.8) в проекциях:
 (3.14)
(3.14)
из треугольника CDO1
определяем угол ![]() :
:
 (3.15)
(3.15)
![]() (3.16)
(3.16)
 (3.17)
(3.17)
координаты центров масс:
 (3.18)
(3.18)
 (3.19)
(3.19)
С целью проверки правильности полученных выражений производим расчет по формулам (2.3) (2.4) (2.10) (2.11) (2.12) (2.13) (2.15) (2.16) (2.17) (2.18) (2.19)
для 5 положения кривошипа ОА:
т.е. ![]() , считая
, считая ![]()
![]()

![]()

![]()



![]()

![]()
![]()
![]()
![]()
Результаты расчёта положений звеньев:
Таблица 3.1.
|
Величина |
|
|
|
|
|
|
|
|
|
|
Графически |
|
-8,0 |
1,82 |
157 |
87 |
||||
|
Аналитически |
|
-8,468 |
1,816 |
|
|
|
0,151 |
0,917 |
0,390 |
|
Отклонение,
|
5,8 |
0,22 |
0,25 |
1,1 |
Определяем аналоги скоростей. Принимаем ![]() (по часовой стрелки)
(по часовой стрелки)
Дифференцируем по обобщённой координате уравнения (3.3):
 (3.20)
(3.20)
Отсюда:
![]() (3.22)
(3.22)
 (3,21)
(3,21)
Дифференцируем уравнения (3.6): ![]()
 (3.23)
(3.23)
 (3.24)
(3.24)
 (3.25)
(3.25)
Дифференцируем (3.18) и (3.19):
 (3.26)
(3.26)
 (3.27)
(3.27)
Для положения 5:
![]()




Определение аналогов ускорений основано на дифференцировании уравнений (3.20) (3.23) (3.26) (3.27)
 (3.28)
(3.28)
 (3.29)
(3.29)
![]() (3.30)
(3.30)
 (3.31)
(3.31)


 (3.32)
(3.32)
 (3.33)
(3.33)
3.2. Определение аналогов скоростей механизма графическим методом.
1)Скорость точки ![]() :
:
 ;
;
2) из полюса плана скоростей p
откладываем отрезок ![]() =100мм, изображающий вектор
скорости точки
=100мм, изображающий вектор
скорости точки ![]() ;
;
3) подсчитываем масштабный коэффициент скоростей:
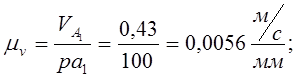
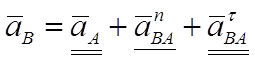
4) скорость точки B:
![]() уравнение решаем
графически.
уравнение решаем
графически.
![]()
![]()
![]()
Через точку ![]() проводим
линию, перпендикулярную AB, а через точку p – прямую
проводим
линию, перпендикулярную AB, а через точку p – прямую ![]() до пересечения
первой.
до пересечения
первой.
![]()
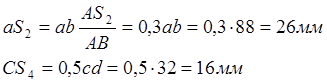
5) Скорость точки С определяем, используя теорему подобия
![]() подобен
подобен ![]() ,
,
на отрезке ab строим ![]() подобный звену 2 (ABC):
подобный звену 2 (ABC):
![]()
6) Скорость точки D:
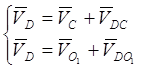 Систему решаем графически
Систему решаем графически
Из точки С проводим прямую, перпендикулярную DC
И точки p проводим прямую,
перпендикулярную ![]() до пересечении с первой –
ставим точку d
до пересечении с первой –
ставим точку d
![]()
7) Скорость точки E: из принципа подобия


![]()
8) Положения точек ![]() и
и
![]() так же находим по теореме подобия.
так же находим по теореме подобия.
![]() и
и ![]() изображают
изображают
![]()
9) из плана скоростей находим:




Определяем аналоги линейных и угловых скоростей:
Таблица 3.1.
|
Величина |
|
|
|
|
|
|
|
|
|
Из плана скоростей |
0,259 |
0,262 |
0,221 |
0,832 |
- |
- |
- |
- |
|
Аналити-чески |
0,258 |
0,270 |
-0,225 |
0,851 |
0,232 |
-0,260 |
0,233 |
-0,080 |
|
Погрешность |
0,4 |
2,9 |
1,8 |
2,2 |
- |
- |
- |
- |
Направления ![]() указаны на
чертеже.
указаны на
чертеже.
3.3. Определение аналогов ускорений механизма графическим методом.
1) Ускорение точки A:

2)Из точки ![]() - полюса плана ускорений –
откладываем вектор , изображающий ускорение точки
- полюса плана ускорений –
откладываем вектор , изображающий ускорение точки ![]() в
виде отрезка
в
виде отрезка ![]()
2) Подсчитываем масштабный коэффициент ускорений
3) Ускорение точки B
 ,
,
![]()
![]()
![]()
![]()
Решаем графически нормальное ускорение

Из точки а откладываем отрезок  параллельно
в направлении от В к А.
параллельно
в направлении от В к А.
Через ![]() проводим прямую
перпендикулярную АВ
проводим прямую
перпендикулярную АВ
Через ![]() проводим прямую
проводим прямую ![]() до пересечения с последней, отсюда
точка b.
до пересечения с последней, отсюда
точка b.
4) Ускорение точки С:
Из теоремы подобия строим на ab треугольник ABC, подобный треугольнику ABC.
5) Ускорение точки D:
![]()
![]()
![]()
![]()
Решаем систему графическим методом
Определяем нормальные ускорения:

Отразим, изобразим эти ускорения:
Из точки С откладываем ![]() параллельно
параллельно
![]() (От D к С)
(От D к С)
Через ![]() проводим прямую,
перпендикулярную CD.
проводим прямую,
перпендикулярную CD.
Из точки ![]() откладываем
откладываем ![]() параллельно
параллельно ![]() (от
D к
(от
D к ![]() )
)
Через ![]() проводим прямую,
перпендикулярную
проводим прямую,
перпендикулярную ![]()
На пересечении перпендикуляров – точка d.
6) Ускорения
точек E![]() определяем,
используя теорему подобия
определяем,
используя теорему подобия
7) Из плана ускорений получаем:
![]()


![]()
Аналоги линейных и угловых ускорений:
Направления ![]() показаны на
чертеже.
показаны на
чертеже.
Таблица 3.2.
|
Величина |
|
|
|
|
|
|
|
|
|
Из плана скоростей |
0,138 |
-0,439 |
-0,531 |
-0,888 |
- |
- |
- |
- |
|
Аналити-чески |
0,139 |
-0,438 |
-0,552 |
-0,913 |
-0,392 |
-0,138 |
-0,352 |
0,058 |
|
Погрешность |
1,7 |
0,14 |
3,7 |
2,7 |
- |
- |
- |
- |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.