1 Введение2 Назначение и область применения разрабатываемого изделия2.1 По заданным числовым значениям тахограммы и момента нагрузки сделать предварительный выбор типа и мощности двигателя постоянного тока. При необходимости применить редуктор с КПД, равным 0,75. Принять значение момента торможения равным трём значениям момента нагрузки. Выбрать и обосновать способ управления двигателем. Разработать функциональную схему управления двигателем. 3 Технические характеристики3.1 Значения
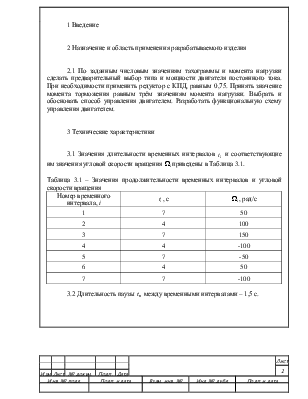
длительности временных интервалов Таблица 3.1 – Значения продолжительности временных интервалов и угловой скорости вращения
3.2 Длительность
паузы |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
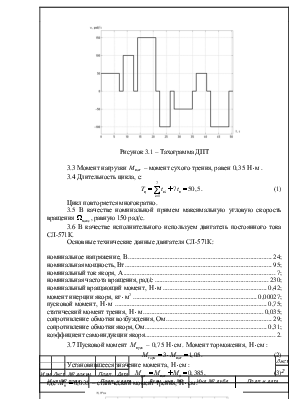
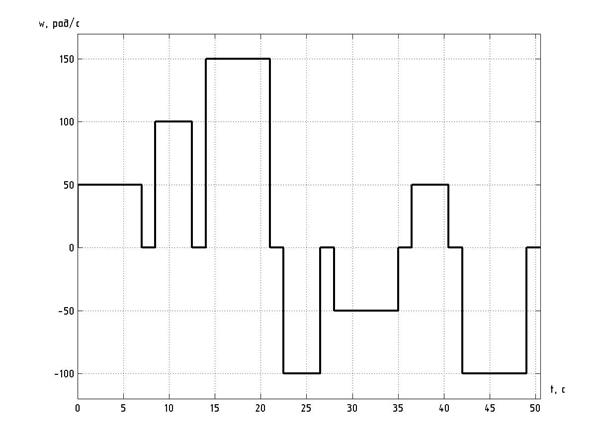
Рисунок 3.1 – Тахограмма ДПТ 3.3 Момент нагрузки 3.4 Длительность цикла, с:
Цикл повторяется многократно. 3.5 В качестве
номинальной примем максимальную угловую скорость вращения 3.6 В качестве исполнительного используем двигатель постоянного тока СЛ-571К. Основные технические данные двигателя СЛ-571К: номинальное напряжение, В................................................................ 24; номинальная мощность, Вт................................................................. 95; номинальный ток якоря, А.................................................................... 7; номинальная частота вращения, рад/с.............................................. 230; номинальный вращающий
момент, момент инерции якоря, пусковой момент, статический момент трения,
сопротивление обмотки возбуждения, Ом......................................... 29; сопротивление обмотки якоря, Ом.................................................. 0,31; коэффициент самоиндукции якоря....................................................... 2. 3.7 Пусковой момент
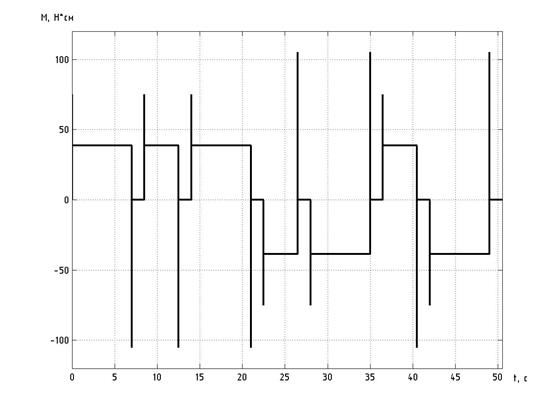
Установившееся значение момента,
Рисунок 3.2 – Временная диаграмма динамического момента 3.8 Электромагнитный коэффициент, Вб/рад:
где
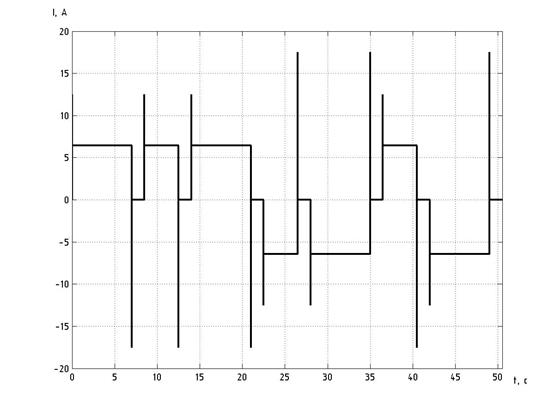
Mном – номинальный момент, Iя ном – номинальный ток якоря, А. Ток пуска, А:
Ток торможения, А:
Установившееся значение тока, А:
Рисунок 3.3 – Временная диаграмма тока якоря 3.9 Время пуска для постоянного момента пуска, с:
Время торможения для постоянного момента торможения, с:
Таблица 3.2 – Значения времени пуска и торможения
3.10 Значение эквивалентного момента,
где
Используем значение эквивалентного
момента в качестве оценки тепловой нагрузки. Для предотвращения перегрева
двигателя необходимо, чтобы номинальный вращающий момент был не меньше
эквивалентного: 3.11 При пуске напряжение питания равно 24 В. Для различных значений угловой скорости вращения значение напряжения питания якоря, В:
Для различных значений угловой скорости вращения (Таблица 3.1) справедливы различные значения напряжения питания якоря (Таблица 3.3). Таблица 3.3 – Значения напряжения питания якоря для различной угловой скорости вращения в установившемся режиме
При торможении напряжение питания якоря зависит от ЕДС, индуцируемой в обмотке якоря, которая, в сою очередь, зависит от угловой скорости вращения якоря.
Таблица 3.4 – Значения напряжения питания якоря при торможении для различной угловой скорости вращения
4 Описание и обоснование выбранной конструкции4.1 Разработка виртуальной модели ДПТ НВ4.1.1 Для ДПТ НВ справедлива система уравнений:
где
Tв – постоянная времени цепи обмотки возбуждения; Tя – электромагнитная постоянная времени; Tм – электромеханическая постоянная времени.
Рисунок 4.1 – Блок схема ДПТ НВ
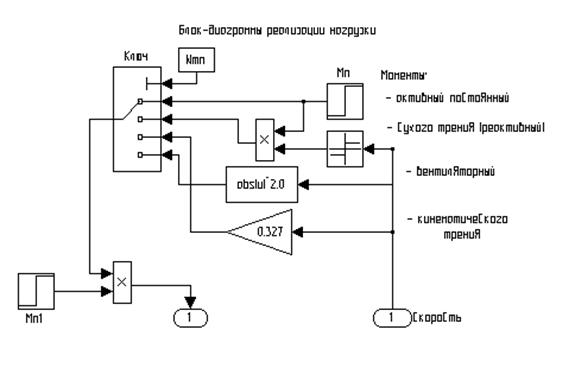
Рисунок 4.2 – Блок схема реализации нагрузочного момента Приблизительное значение индуктивности обмотки якоря, Гн:
где 2p – число полюсов; nном – номинальная частота вращения, об/мин; cx – эмпирический коэффициент ( Электромагнитная постоянная времени:
Электромеханическая постоянная времени:
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 .
(1)
.
(1)
 ,
(4)
,
(4) .
(5)
.
(5) .
(6)
.
(6) .
(7)
.
(7)
 .
(8)
.
(8) .
(9)
.
(9) , (10)
, (10) – суммарное время пуска за цикл, с;
– суммарное время пуска за цикл, с;  – суммарное время торможения за цикл, с;
– суммарное время торможения за цикл, с; – суммарное время работы в
установившемся режиме за цикл, с.
– суммарное время работы в
установившемся режиме за цикл, с. .
(11)
.
(11) .
(13)
.
(13) (14)
(14) –
относительное напряжение питания обмотки возбуждения, о.е.;
–
относительное напряжение питания обмотки возбуждения, о.е.; – относительное напряжение питания
обмотки о.е.;
– относительное напряжение питания
обмотки о.е.; – относительный ток в обмотке
возбуждения, о.е.;
– относительный ток в обмотке
возбуждения, о.е.; – относительный ток в обмотке якоря,
о.е.;
– относительный ток в обмотке якоря,
о.е.; – относительный магнитный поток обмотки
возбуждения, о.е.;
– относительный магнитный поток обмотки
возбуждения, о.е.;  – относительная угловая скорость
вращения, о.е.;
– относительная угловая скорость
вращения, о.е.; – относительный механический момент,
о.е.;
– относительный механический момент,
о.е.;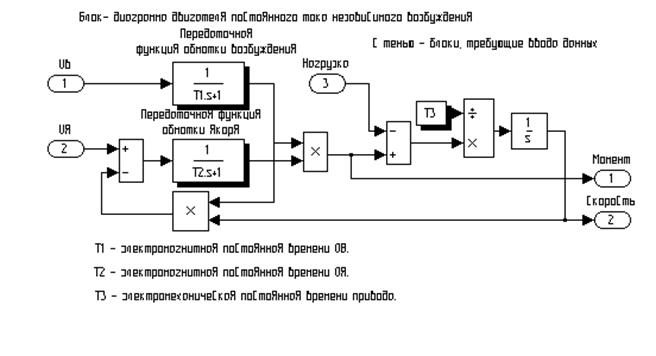
 ,
(15)
,
(15) . (16)
. (16) .
(17)
.
(17)