МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Лабораторная работа №4
«Применение обводного канала в системах стабилизации»
Группа: АА-66
Студент: Абусагитов Д.Р. Преподаватель: Жмудь В.А.
Дата сдачи:
Отметка о защите:
Новосибирск, 2010
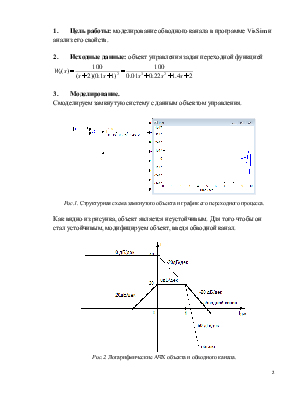
1. Цель работы: моделирование обводного канала в программе VisSim и анализ его свойств.
2. Исходные данные: объект управления задан переходной функцией

3. Моделирование.
Смоделируем замкнутую систему с данным объектом управления.
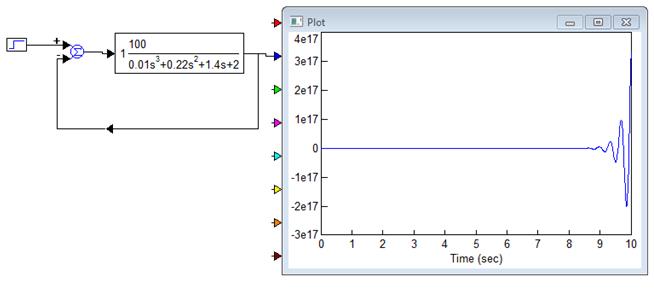
Рис.1. Структурная схема замкнутого объекта и график его переходного процесса.
Как видно из рисунка, объект является неустойчивым. Для того чтобы он стал устойчивым, модифицируем объект, введя обводной канал.
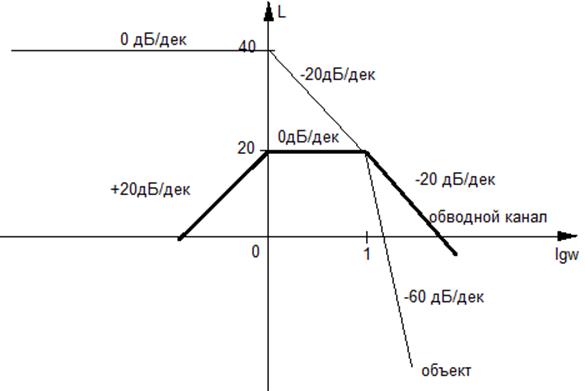
Рис.2. Логарифмические АЧХ объекта и обводного канала.
Согласно ЛАЧХ, передаточная функция обводного канала будет иметь вид:

Смоделируем преобразованную систему.
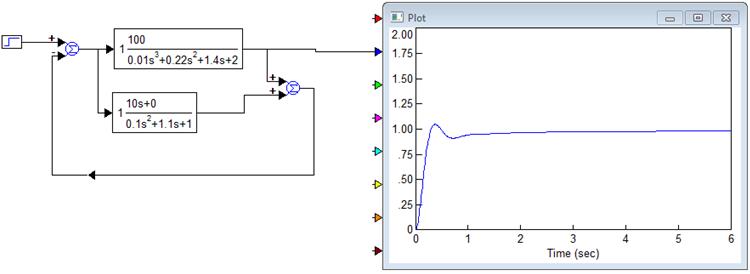
Рис.3. Система с обводным каналом и ее переходный процесс.
Введенный обводной канал сделал объект управления устойчивым.
При
введении ПИД-регулятора в качестве стоимостной функции будем использовать
обобщённый интеграл модуля ошибки y=![]() .
.
Для этой системы построить ПИД-регулятор не удалось, воспользуемся ПИ-регулятором.
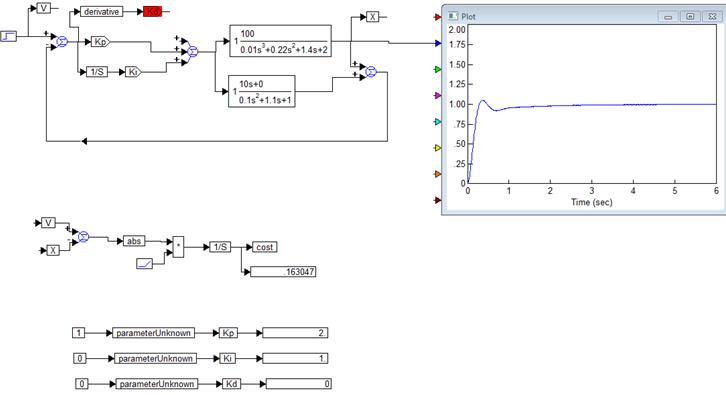
Рис.4. Система с обводным каналом и ПИ-регулятором.
Введение ПИ-регулятора свело ошибку к малому значению (0.163).
4. Вывод.
В результате проделанной лабораторной работы убедились, что использование обводного канала позволяет обеспечить устойчивость объекта управления.
5. Список использованной литературы.
Жмудь В.А. Моделирование и оптимизация систем управления лазерным излучением в среде VisSim: Учебное пособие/ Новосиб. гос. ун-т. Новосибирск, 2010. 118 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.