Теорема 4.19. Рассмотрим
систему с обратной связью на рис.4.5, где объект полностью описывается ее
правильной передаточной функцией ![]() .Задающий сигнал
.Задающий сигнал ![]() и возмущающий сигнал
и возмущающий сигнал ![]() могут
быть смоделированы как
могут
быть смоделированы как ![]() и
и ![]() . Пусть
. Пусть ![]() будет
наименьшим общим знаменателем неустойчивых полюсов
будет
наименьшим общим знаменателем неустойчивых полюсов ![]() и
и ![]() . Если нет корней
. Если нет корней ![]() ,
являющихся нулями
,
являющихся нулями ![]() , тогда существует компенсатор такой,
что система с единичной обратной связью асимптотически устойчива и достигается
асимптотическое отслеживание задающего воздействия.
, тогда существует компенсатор такой,
что система с единичной обратной связью асимптотически устойчива и достигается
асимптотическое отслеживание задающего воздействия.
Процедура синтеза, развиваемая при доказательстве этой теоремы, состоит из следующих шагов:
1.
Введение ![]() в
устройство управления.
в
устройство управления.
2. Введение моделей задающего и возмущающего воздействий.
3. Стабилизация системы посредством введения компенсатора
![]() .
.
Многоканальный случай. Исследуем задачу синтеза многоканальной системы, указанной на рис.4.6.
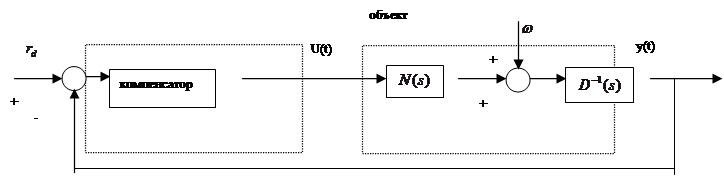 |
Рис.4.6. Многоканальная система
Объект описывается q*p
строго правильной рациональной матрицей G(s),
представленной как произведение ![]() , где
, где![]() и
и ![]() соответственно
q*q и q*p полиномиальные матрицы. Предположим, что задающий
сигнал q*1
соответственно
q*q и q*p полиномиальные матрицы. Предположим, что задающий
сигнал q*1![]() и
возмущающий сигнал q*1
и
возмущающий сигнал q*1 ![]() описываются
описываются
![]() и
и ![]() , где
, где![]() и
и
![]() q*q полиномиальные
матрицы и
q*q полиномиальные
матрицы и ![]() и
и ![]() q*1
полиномиальные матрицы. Задача состоит в поиске компенсатора такого, чтобы для
любых
q*1
полиномиальные матрицы. Задача состоит в поиске компенсатора такого, чтобы для
любых ![]() и
и ![]()
![]()
![]()
Процедура синтеза состоит, как и в случае одноканальных систем, во введении в систему внутренней модели ее стабилизации.
Пусть
![]() наименьший общий знаменатель неустойчивых
полюсов всех элементов
наименьший общий знаменатель неустойчивых
полюсов всех элементов ![]() и
и ![]() . Пусть
. Пусть ![]() , где
, где ![]() и
и ![]() левое взаимно простое разложение и
левое взаимно простое разложение и ![]() и
и ![]() правое
взаимно простое разложение.
правое
взаимно простое разложение.
Определение 4.4. ![]() называют передаточным нулем
(transmission zero) G(s), если
называют передаточным нулем
(transmission zero) G(s), если
![]() , или
, или ![]() .
.
Будем говорить, что А «следует» за В, если W=BA (рис.4.7)
Рис.4.7. А «следует» за В
Теорема 4.20. Последовательное
соединение![]() и q*p
правильной рациональной матрицы G(s) так, что
и q*p
правильной рациональной матрицы G(s) так, что ![]() следует за G(s),(G(s)следует
за
следует за G(s),(G(s)следует
за ![]() ) управляемое и наблюдаемое, если только
если нет корней
) управляемое и наблюдаемое, если только
если нет корней ![]() , являющихся передаточными нулями
G(s) и
, являющихся передаточными нулями
G(s) и ![]() или эквивалентно
или эквивалентно
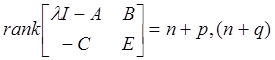
для
каждого корня ![]() , где
, где ![]() - любая
неприводимая реализация G(s) n- размерность А или степень G(s).
- любая
неприводимая реализация G(s) n- размерность А или степень G(s).
Теорема 4.21. Рассмотрим
систему 4.6, где компенсатор равен ![]() и объект полностью
описывается q*p правильной рациональной матрицей G(s).
Предполагается, что задающий сигнал
и объект полностью
описывается q*p правильной рациональной матрицей G(s).
Предполагается, что задающий сигнал ![]() и
возмущающий сигнал
и
возмущающий сигнал ![]() моделируются
моделируются ![]() и
и ![]() . Пусть
. Пусть
![]() будет наименьшим знаменателем неустойчивых
полюсов каждого элемента
будет наименьшим знаменателем неустойчивых
полюсов каждого элемента ![]() и
и ![]() . Если нет корней
. Если нет корней ![]() ,
являющихся передаточными нулями G(s) и
,
являющихся передаточными нулями G(s) и ![]() или эквивалентно
или эквивалентно
для каждого корня ![]() полинома
полинома ![]() , тогда
существует компенсатор с p*q правильной рациональной матрицей такой, что система с
обратной связью асимптотически устойчива и обеспечивает асимптотическое
отслеживание и компенсацию возмущения.
, тогда
существует компенсатор с p*q правильной рациональной матрицей такой, что система с
обратной связью асимптотически устойчива и обеспечивает асимптотическое
отслеживание и компенсацию возмущения.
Проектирование
сводится к двум действиям: введению внутренней модели ![]() и
стабилизации системы с обратной связью введением компенсатора
и
стабилизации системы с обратной связью введением компенсатора ![]() . Таким образом, полный компенсатор
оказывается равным
. Таким образом, полный компенсатор
оказывается равным ![]() .
.
Статическое развязывание. Робастный и неробастный синтез
Рассмотрим систему с обратной связью, изображенную на рис.4.7, объект описывается q*p правильной рациональной матрицей G(s).
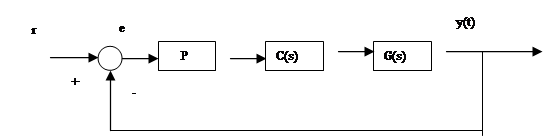 |
Рис.4.7. Синтез системы с единичной обратной связью
Пусть задающий сигнал будет
![]() , где d- произвольный q*1
постоянный вектор. Нас интересует установившаяся реакция (steady-
state) переходной функции (transient response). Пусть передаточная функция всей системы от r к y
будет
, где d- произвольный q*1
постоянный вектор. Нас интересует установившаяся реакция (steady-
state) переходной функции (transient response). Пусть передаточная функция всей системы от r к y
будет ![]() . Если
. Если ![]() устойчивая,
тогда установившееся значение при действии
устойчивая,
тогда установившееся значение при действии ![]() может
быть вычислено используя теорему о конечном значении:
может
быть вычислено используя теорему о конечном значении:
![]() .
.
Если
![]() диагональная и несингулярная, в частности
единичная матрица, то систему называют статически развязанной (statically decoupled).
диагональная и несингулярная, в частности
единичная матрица, то систему называют статически развязанной (statically decoupled).
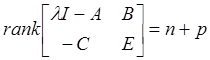
Следствие 4.3. Рассмотрим
систему рис.4.7, где объект полностью характеризуется q*p
правильной рациональной матрицей G(s). Если s не является передаточным нулем G(s) и ![]() или эквивалентно
или эквивалентно
 , тогда существует
компенсатор с q*p правильной рациональной матрицей такой, что система
асимптотически устойчива и статически развязываема, где
, тогда существует
компенсатор с q*p правильной рациональной матрицей такой, что система
асимптотически устойчива и статически развязываема, где ![]() -
любая неприводимая реализация G(s).
-
любая неприводимая реализация G(s).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.