






СБОРНИК НАУЧНЫХ ТРУДОВ НГТУ. – 2010. – № 1(59). – 21–31
УДК 681.513
СТАБИЛИЗАЦИЯ ДВУХМАССОВОЙ СИСТЕМЫ: модальный МЕТОД СИНТЕЗА в пространстве состояний
А.А. Воевода©, Е.В. ШОБА§
На примере двухканальной системы продемонстрирован модальный метод синтеза в пространстве состояний с использованием пропорциональной матрицы в канале обратной связи. Для оценки вектора состояния использован наблюдатель полного порядка.
Ключевые слова: многоканальная система, двухмассовая система, синтез, модальный метод, пространство состояний, наблюдатель, обратная связь.
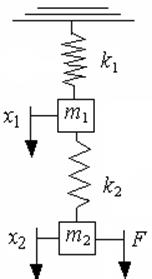
Постановка
задачи. В качестве объекта управления
возьмем двухмассовую систему (рис.1), в которой два управляющих сигнала, силы ![]() и
и ![]() ,
приложены к массам
,
приложены к массам ![]() и
и ![]() ,
подвешенных последовательно на двух пружинах жесткости k1 и k2,
а регулируемые величины – положение грузиков
,
подвешенных последовательно на двух пружинах жесткости k1 и k2,
а регулируемые величины – положение грузиков ![]() и
и
![]() . В отличие от [1, 2], где рассмотрен
модальный метод синтеза одноканальной и двухканальной системы с использованием
полиномиального представления, ниже приведен расчет классическим способом с
использованием пространства состояний.
. В отличие от [1, 2], где рассмотрен
модальный метод синтеза одноканальной и двухканальной системы с использованием
полиномиального представления, ниже приведен расчет классическим способом с
использованием пространства состояний.
При
доступности вектора состояния ![]() объекта
объекта
![]() ,
, ![]() (1)
(1)
для
смещения полюсов объект охватывают обратной связью ![]() , где
, где ![]() - матрица коэффициентов. Тогда уравнение
системы следующее:
- матрица коэффициентов. Тогда уравнение
системы следующее: ![]() . Выбором
. Выбором ![]() можно
задать полюса системы. Удобно эти вычисления производить в управляемой
канонической форме.
можно
задать полюса системы. Удобно эти вычисления производить в управляемой
канонической форме.
Если вектор состояния не доступен, то необходимо ввести наблюдатель, например, полного порядка:
![]() .
(2)
.
(2)
Матрица ![]() вычисляется из условия
быстрого, по сравнению с переходными процессами в системе, затухания. Ошибка
оценки
вычисляется из условия
быстрого, по сравнению с переходными процессами в системе, затухания. Ошибка
оценки ![]() вектора состояния
вектора состояния ![]() описывается
уравнением
описывается
уравнением ![]() . Вычисление
. Вычисление ![]() удобно
производить в наблюдаемой
канонической форме. В этом случае
матрица
удобно
производить в наблюдаемой
канонической форме. В этом случае
матрица ![]() «подключается» к оценке
«подключается» к оценке ![]() :
:
![]() .
(3)
.
(3)
Расчеты по определению матриц ![]() и
и
![]() удобно производить по отдельности, так как
характеристическое уравнение всей системы определяется так:
удобно производить по отдельности, так как
характеристическое уравнение всей системы определяется так: ![]() ×
×![]() .
.
Решим задачу автономизации каналов. Проведем расчет двухканального регулятора, обеспечивающего заданные полюса замкнутой системы, в три этапа:
1) в предположении доступности вектора состояния рассчитаем обратную связь (коэффициентная матрица) в канонической управляемой форме;
2) вычислим наблюдатель вектора состояния полного порядка в канонической наблюдаемой форме;
3) перейдем к единому базису.
Модель объекта.
 В предположении отсутствия
демпфирования модель объекта «вход - выход» следующая:
В предположении отсутствия
демпфирования модель объекта «вход - выход» следующая:
![]() ,
(4)
,
(4)
![]() .
.
Объект – это двухканальная система,
между входами и выходами которой находятся по два интегратора. Очевиден переход
к описанию в пространстве состояний - достаточно выходы интеграторов обозначать
справа налево: ![]() - у канала «первый вход – первый
выход»,
- у канала «первый вход – первый
выход», ![]() - у канала «второй вход
- у канала «второй вход
– второй выход».
Рис.1. Модель объекта Получили управляемую каноническую форму:
![]() ,
,
![]() ,
(5а)
,
(5а)
![]() ,
,
![]() ,
,
![]() ,
, ![]() .
(5б)
.
(5б)
Если выходы интеграторов обозначать слева на право, то получим наблюдаемую каноническую форму:
![]() ,
,
![]() , (6а)
, (6а)
![]() ,
,
![]() ,
,
![]() ,
, ![]() .
(6б)
.
(6б)
Зададим следующие значения
параметров объекта: ![]() .
.
Вычисление матрицы обратной связи. В матричном виде уравнения (5) запишутся так:
![]() ,
, ![]() .
(7)
.
(7)
Воспользовавшись
(5) найдем матрицы ![]() , соответствующие управляемой
канонической форме:
, соответствующие управляемой
канонической форме:
 ,
,  ,
,  .
.
Матрица
![]() состоит из четырех матриц размером 2 на 2 -
состоит из четырех матриц размером 2 на 2 -
![]() (j, k=1,
2): диагональные матрицы описывают собственные свойства первого и второго каналов,
а недиагональные матрицы не нулевые и указывают на перекрестные связи между
каналами. Таким образом, введением матрицы
(j, k=1,
2): диагональные матрицы описывают собственные свойства первого и второго каналов,
а недиагональные матрицы не нулевые и указывают на перекрестные связи между
каналами. Таким образом, введением матрицы ![]() в
обратную связь
в
обратную связь
![]() ,
, ![]()
в
предположении доступности вектора состояний ![]() ,
необходимо скомпенсировать элементы
,
необходимо скомпенсировать элементы ![]() матрицы
матрицы ![]() для устранения перекрестных связей.
Собственные свойства канала «первый вход – первый выход» определяются
коэффициентами второй строки матрицы
для устранения перекрестных связей.
Собственные свойства канала «первый вход – первый выход» определяются
коэффициентами второй строки матрицы ![]() : {-2 0}, что соответствует
коэффициентам характеристического полинома
: {-2 0}, что соответствует
коэффициентам характеристического полинома ![]() .
Собственные свойства канала «второй вход – второй выход» определяются коэффициентами
второй строки матрицы
.
Собственные свойства канала «второй вход – второй выход» определяются коэффициентами
второй строки матрицы ![]() : {-1 0}, что соответствует
коэффициентам характеристического полинома
: {-1 0}, что соответствует
коэффициентам характеристического полинома ![]() .
Зададим собственные свойства каналов системы полиномом
.
Зададим собственные свойства каналов системы полиномом ![]() ,
что соответствует полюсам -1, -1. Таким образом, матрицу
,
что соответствует полюсам -1, -1. Таким образом, матрицу ![]() находим из условия:
находим из условия:
 . (8а)
. (8а)
Матрица
![]() неизвестная – элементы ее обозначим
неизвестная – элементы ее обозначим ![]() :
:
 .
.
Вычислим
![]() :
:
 (8б)
(8б)
Из сравнения (5а) и (5б)
находим элементы матрицы ![]() :
:
 . (9)
. (9)
Здесь число уравнений равно числу
неизвестных. Выполним проверку, а именно, найдем передаточную функцию объекта
по формуле ![]() :
:
 , где
, где
![]() , и передаточную функцию объекта, охваченного
обратной связью
, и передаточную функцию объекта, охваченного
обратной связью ![]() по состоянию
по состоянию ![]() :
:
 .
.
Вычисление наблюдателя полного порядка. Запишем уравнения (6) в матричном виде:
![]() ,
, ![]() .
(10)
.
(10)
Здесь
 ,
,  ,
,  .
.
Очевидно,
что мы получили наблюдаемую каноническую форму. Матрицы ![]() ,
,
![]() и
и ![]() составлены
из матриц размером 2×2. Матрица
составлены
из матриц размером 2×2. Матрица ![]() состоит из четырех
матриц
состоит из четырех
матриц ![]() размером 2×2: диагональные матрицы
описывают собственные свойства первого и второго каналов: Собственные свойства
канала «первый вход – первый выход» определяются коэффициентами
размером 2×2: диагональные матрицы
описывают собственные свойства первого и второго каналов: Собственные свойства
канала «первый вход – первый выход» определяются коэффициентами
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.