Министерство образования и науки РФ
Новосибирский Государственный Технический Университет
Кафедра Автоматики
Лабораторная работа №1:
Моделирование электроприводов факультет: АВТ группа: АА-16 Проверил: студент: Старченко А. Кондратьев В. А.
Новосибирск
2005
Задание
Для выполненного в прошлом семестре проекта необходимо разработать схемы управления, реализованные на базе управляемого выпрямителя и широтно-импульсного преобразователя.
- под заданный график изменения нагрузки с целью уточнения эквивалентных значений моментов и токов по «гладкой составляющей»;
- под выбранные вид и параметры настройки регулятора в различных режимах работы в разомкнутой и замкнутой системах;
Исходные данные:
Вариант работы определяется по номеру зачетной книжки – NL (24).
N |
Ω1 |
Ω2 |
Ω3 |
Ω4 |
Ω5 |
Ω6 |
Ω7 |
|
2 |
75 |
100 |
-100 |
150 |
-150 |
100 |
-75 |
Ω – текущая частота вращения двигателяТаблица 2. Временные параметры тахограммы |
|||||||
|
L |
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
t7 |
|
4 |
1 |
5 |
1 |
5 |
1 |
5 |
1 |
ti (cек) – текущее время работы двигателя на установившейся частоте вращения - Wi.
Время паузы tп в работе двигателя для всех вариантов – 0,5 сек.
Момент нагрузки – реактивный.
Мнаг. = 0.3 Н*м – чётный вариант.
Рис 1. Тахограмма двигателя
Момент нагрузки – реактивный. Мнаг = 0,3 Н*м.
Моменты при пуске и торможении Мпуск = Мторм = 3* Мнаг = 0.9 Н*м.
Тип выбранного двигателя постоянного тока: СЛ-321
Основные технические данные на ДПТ СЛ-321:
- номинальное напряжение, В:........................ 110;
- номинальная мощность, Вт:....................... 50;
- номинальный ток возбуждения, А:.............. 0,8;
- номинальный ток якоря, А:.......................... 0,85;
- номинальная частота вращения, об/мин:... 3000;
-
номинальный
вращающий момент,![]() :.... 0,16;
:.... 0,16;
-
момент
инерции якоря,![]() :...................... 0,00007;
:...................... 0,00007;
-
пусковой
момент,![]() :................................ 0,4;
:................................ 0,4;
-
статический
момент трения, ![]() :.......... 0,013;
:.......... 0,013;
- сопротивление обмотки возбуждения, Ом:..... 1160;
- сопротивление обмотки якоря, Ом:........... 20.5;
- коэффициент самоиндукции якоря:............ 115.
Индуктивность якоря может быть ориентировочно найдена по формуле:
где Uном – в В; nном – в об/мин; Iяном – в А; сx – эмпирический коэффициент
(сx = 0.4 для машин без компенсационной обмотки, сx = 0.1 для машин с компенсационной обмоткой); Lя – в Гн.

Разработка функциональной модели ДПТ НВ выполняется под вид уравнений, приведенных ниже
|
|
где - относительные переменные состояния двигателя:
- параметры двигателя:
|
Математическое описание модели требует нахождения электромагнитных и электромеханических параметров машины. Для описания ДПТ требуется определить электромеханическую и электромагнитную постоянную времени.
Постоянная
времени обмотки якоря: 
Постоянная
времени обмотки возбуждения:  0.00007
c
0.00007
c
Электромагнитная
постоянная времени: 
Е = К·Ф·ω.
Мд = К·Ф·Iя.
Мном = К·Ф·Iя ном.
К·Ф = Мном / Iя ном = 0,16 Н·м / 085 А = 0,188 Н·м/А.
Iя = Мд / 0,188.
Пусковой ток: Iя max = Мпуск / 0,188 = 0,9/0,188 = 4,78 А.
Это означает, что результирующий момент инерции, приведенный к валу двигателя, составляет:

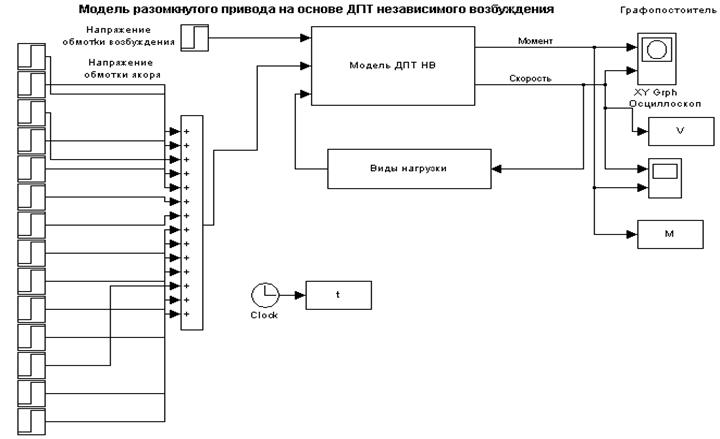
Рис.2. Модель для изучения принципов работы двигателя
постоянного тока независимого возбуждения.
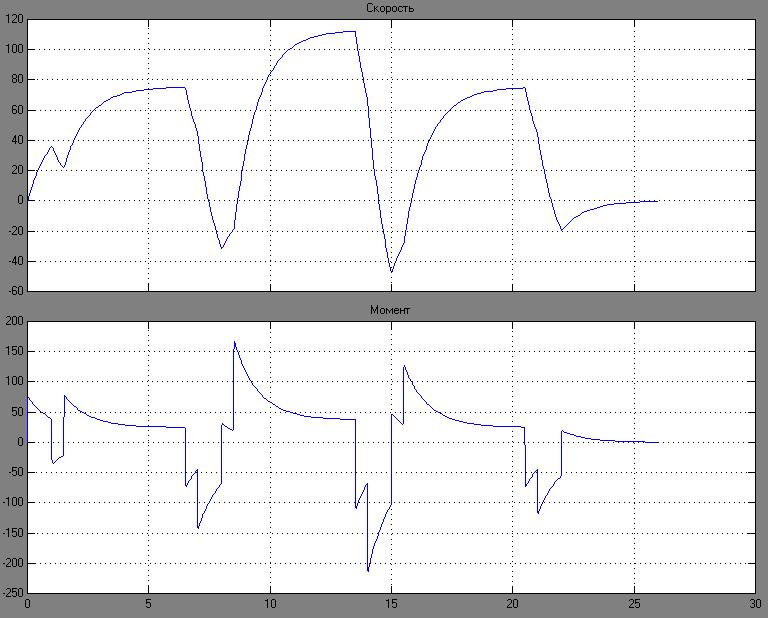
Рис. 3 Диаграмма скоростей и моментов для ДТП НВ
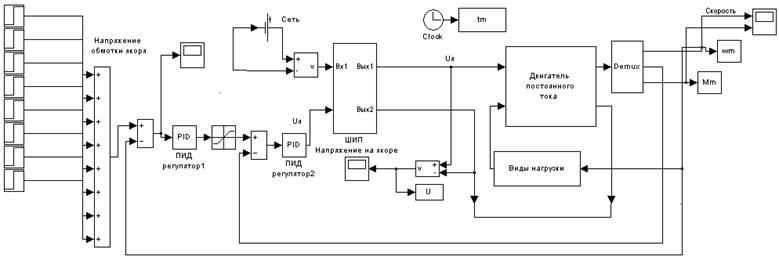
Рис. 4. Виртуальная модель замкнутой системы и ШИП
В системах подчинённого регулирования используются регуляторы четырёх типов:
-
пропорциональные (П) с
передаточной функцией ![]() ;
;
-
интегральные (И),  ;
;
-
пропорционально-интегральные (ПИ),
 ;
;
- пропорционально-интегро-дифференциальные (ПИД),
 .
.
Последовательность синтеза регуляторов в подчиненных системах электропривода следующая.
Для первого контура результирующее
эквивалентное звено, состоящее из исходного звена с передаточной функцией ![]() и регулятора с передаточной функцией
и регулятора с передаточной функцией ![]() , всегда можно привести к интегрирующему
звену с передаточной функцией
, всегда можно привести к интегрирующему
звену с передаточной функцией  . Следовательно,
регулятор всегда должен быть построен так, чтобы
. Следовательно,
регулятор всегда должен быть построен так, чтобы
 .
.
Если в
основной цепи имеется интегрирующее звено  , то
регулятор должен быть пропорциональным, причём
, то
регулятор должен быть пропорциональным, причём
![]() ;
;  , где
, где  ; при
; при ![]() постоянная
времени
постоянная
времени ![]() может иметь любое малое значение. После
создания замкнутого контура, его передаточная функция будет соответствовать
апериодическому звену с малой постоянной времени
может иметь любое малое значение. После
создания замкнутого контура, его передаточная функция будет соответствовать
апериодическому звену с малой постоянной времени  .
.
Если исходное
звено является апериодическим с передаточной функцией  ,
то регулятор должен иметь передаточную функцию, соответствующую ПИ-регулятору,
,
то регулятор должен иметь передаточную функцию, соответствующую ПИ-регулятору,  .
.
Тогда  ,
или после охвата обратной связью опять получим:
,
или после охвата обратной связью опять получим:  .
.
Если исходная система представляет собой колебательное звено с передаточной
функцией  , то в соответствии с изложенным
подходом регулятор должен быть ПИД-регулятором с передаточной функцией
, то в соответствии с изложенным
подходом регулятор должен быть ПИД-регулятором с передаточной функцией ![]()
 .
.
В этом случае передаточные
функции разомкнутой и замкнутой системы примут вид:  .
.
Рассмотрим второй контур. Если исходное звено второго контура является интегрирующим
с передаточной функцией  , то общая передаточная
функция первого и исходного второго звена будет равна:
, то общая передаточная
функция первого и исходного второго звена будет равна:  .
Для таких и более сложных систем регулятор синтезируется таким образом, чтобы
в замкнутом контуре получить желаемую передаточную функцию. В качестве желаемых
передаточных функций в системах электропривода используются две:
.
Для таких и более сложных систем регулятор синтезируется таким образом, чтобы
в замкнутом контуре получить желаемую передаточную функцию. В качестве желаемых
передаточных функций в системах электропривода используются две:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





 ;
; 
