МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Расчетно-графическая работа
по курсу: «Многоканальные системы»
Факультет: АВТ
Группа: ААМ-10
Студент: Преподаватель:
Солдаткин А. А. Воевода А.А.
Новосибирск 2010
|
№ |
Дата |
Содержание |
Примечание |
Цель работы: разработать и синтезировать регулятор для двухканальной системы, состоящей из трех масс полиномиальным методом синтеза.
Постановка задачи
В качестве объекта управления взята трехмассовая система (рис. 1), в которой два управляющих сигнала, силы u1 и u3, приложены к первой и третьей массам m1и m3, подвешенным последовательно на трех пружинах жесткостью k1, k2 и k3, а регулируемые величины – положения двух верхних грузиков.
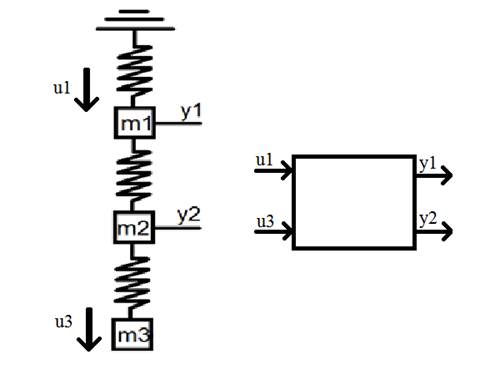
Рис. 1. Схематичное изображение физического объекта управления.
Зададим значения параметров объекта:
m1= 4 k1 = 2
m2= 2 k2 = 2
m3= 2 k3= 2
Модель объекта
В качестве объекта управления возьмем систему из
трех масс ![]() , последовательно соединенных пружинами
жесткостью
, последовательно соединенных пружинами
жесткостью ![]() . Массы, а также их координаты
. Массы, а также их координаты ![]() пронумерованы сверху вниз. Предполагается
два управляющих сигнала – силы u1
и u3,
приложенные к массам m1
и m3.
Демпфирование равно нулю. Управляемыми величинами будем считать координаты
грузов
пронумерованы сверху вниз. Предполагается
два управляющих сигнала – силы u1
и u3,
приложенные к массам m1
и m3.
Демпфирование равно нулю. Управляемыми величинами будем считать координаты
грузов ![]() и
и ![]() ,
отсчитываемые от состояния равновесия. [1]
,
отсчитываемые от состояния равновесия. [1]
![]()
![]()
![]()
Перейдем к изображениям:
![]()
![]()
![]()
Сгруппируем переменные:
![]()
![]()
![]()
Умножив второе уравнение на
множитель ![]() , исключим переменную
, исключим переменную ![]() из системы:
из системы:
![]()
![]()
![]()
Запишем матричную передаточную функцию в полиномиальном виде:
 , или, в матричных
обозначениях:
, или, в матричных
обозначениях:
![]() , что соответствует
левому полиномиальному разложению. Здесь
, что соответствует
левому полиномиальному разложению. Здесь

Отнормируем эти матрицы, разделив их на 4:

Найдем detDl(s):
![]() , что соответствует трем
парам комплексно сопряженных полюсов:
, что соответствует трем
парам комплексно сопряженных полюсов:
![]()
Вырождение матрицы Nl(s) происходит при 0,125s2+0,125, что соответствует нулям ±j. Таким образом, имеются совпадающие нули и полюсы у объекта, принадлежащие замкнутой правой полуплоскости, следовательно, достаточное условие разрешимости задачи автономизации не выполнено.
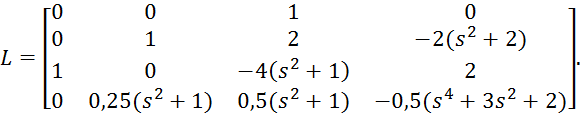
Нами найдено левое разложение матричной передаточной функции:
![]()
Найдем правое полиномиальное разложение объекта:
![]()
Для этого необходимо рассмотреть
матрицу ![]() , которую элементарными операциями над
столбцами следует привести к нижнетреугольному виду
, которую элементарными операциями над
столбцами следует привести к нижнетреугольному виду
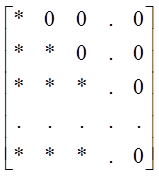 , что соответствует умножению исходной матрицы на
полиномиальные матрицы с определителем, равным вещественному числу (унимодальные
матрицы), справа. Допустим, нам удобнее выполнять операции над строчками.
Исходную матрицу транспонируем
, что соответствует умножению исходной матрицы на
полиномиальные матрицы с определителем, равным вещественному числу (унимодальные
матрицы), справа. Допустим, нам удобнее выполнять операции над строчками.
Исходную матрицу транспонируем ![]() , тогда задача
приведения к нижнетреугольному виду заменится на задачу приведения к
верхнетреугольному виду, а операция умножения справа на унимодальные матрицы
заменится на задачу умножения слева на унимодальные матрицы.
, тогда задача
приведения к нижнетреугольному виду заменится на задачу приведения к
верхнетреугольному виду, а операция умножения справа на унимодальные матрицы
заменится на задачу умножения слева на унимодальные матрицы.
Приведем матрицу ![]() к верхнетреугольному виду:
к верхнетреугольному виду:

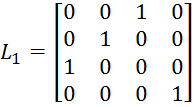
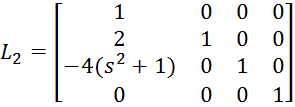
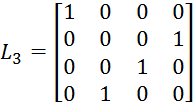
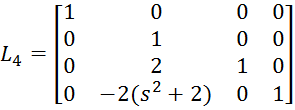
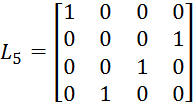
В ходе преобразования использовались следующие матрицы:
|
|
|
|
|
|
|
|
|
Найдем результирующее преобразование
![]() :
:
Для проверки умножим ![]() слева на
слева на ![]() (
(![]() -функция от
-функция от ![]() !) и
получим тот же результат
!) и
получим тот же результат ![]() , или
, или
 .
.
Здесь

 .
.
 .
.
Получено правое взаимно простое разложение матричной передаточной функции объекта.
Синтез регулятора
Отнормируем матричную передаточную
функцию объекта, представленную в виде правого разложения – умножим «числитель»
![]() и «знаменатель»
и «знаменатель» ![]() на
«–2». В результате коэффициент при старшей степени s4
окажется равным единице:
на
«–2». В результате коэффициент при старшей степени s4
окажется равным единице:

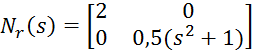
Запишем матрицы ![]() и
и ![]() в
полиномиальном виде
в
полиномиальном виде
![]() ,
,![]() .
.
Здесь


Опишем систему уравнениями
![]()
![]() , где
, где ![]() – выход
объекта,
– выход
объекта, ![]() – выход регулятора,
– выход регулятора, ![]() –
задание.
–
задание.
Найдем передаточную функцию системы:
![]() .
.
Задав регулятор в виде левого
полиномиального разложения ![]()
![]() ,
получим
,
получим
![]() .
.
Выберем структуру «числителя» и «знаменателя», т. е. выберем порядки, например равными трем и трем:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




 ;
; ;
; ;
; ;
; ;
; .
.