4. Построить частотные характеристики динамической жесткости естественной механической характеристики.
5. Определить погрешность, вносимую при использовании для расчета динамики статической механической характеристики, если изменение скорости с частотой f=3 Гц по закону ω=ωном(I+0.1sin18.9t).
6. Построить динамическую механическую характеристику и определить максимум переменной составляющей момента.
Методические указания
1. Построение пусковой диаграммы, расчет секций пускового реостата целесообразно производить по методике, изложенной в /5/, где содержится большое количество практических указаний, формул, графиков, примеров, полезных при выполнении контрольных заданий и курсового проекта.
2. Скорость опускания груза можно определить по механической характеристике:
ω=  , причем:
, причем:
 .
.
3. Расчет сопротивления динамического торможения подробно изложен в /2/.
4. Частотные характеристики динамической жесткости (ЛАХ и ЛФХ) строятся на основе передаточной функции динамической жесткости:
 .
.
Уравнение динамической механической характеристики:
![]() .
.
При р=0 получаем статическую механическую характеристику:
 .
.
Максимум переменной составляющей момента может быть определен по выражению:
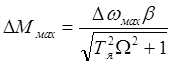 .
.
Перед расчетом частотных характеристик динамической жесткости и динамической механической характеристик следует тщательно проработать /I, §§ 3.2-3.5/
Задача №2. Для привода подъемного механизма используется краново-металлургический двигатель с последовательным возбуждением серии Д (220 В, ПВ=40%). Необходимые данные для каждого варианта приведены в табл. 2 (приложение 1).
Пуск двигателя осуществляется с
помощью трехступенчатого пускового реостата; двигатель осуществляет спуск груза
Мс=0.8Мн со скоростью ![]() . Остановка двигателя
осуществляется в режиме динамического торможения при начальной скорости на
естественной характеристике при Мс=0.8Мн с начальным тормозным
моментом Мнач=2.5.
. Остановка двигателя
осуществляется в режиме динамического торможения при начальной скорости на
естественной характеристике при Мс=0.8Мн с начальным тормозным
моментом Мнач=2.5.
Требуется:
1. Построить естественные электромеханическую и механическую характеристики двигателя.
2. Рассчитать и построить пусковую диаграмму двигателя. Определить значение секций пускового реостата.
3. Определить величину добавочного сопротивления для спуска груза в требуемом режиме.
4. Определить величину сопротивления динамического торможения и построить механическую характеристику.
5.
Определить
напряжение на якоре, при котором механическая характеристика при Rдоб=0 проходит через точку ![]() при М=Мн.
при М=Мн.
Методические указания
1. Характеристики двигателя построить с использованием универсальных характеристик /2/.
2. Построение пусковой диаграммы и расчет пусковых сопротивлений провести методом лучевой диаграммы /5/.
3.
Величину
дополнительного сопротивления, необходимого для получения требуемой скорости ![]() , можно найти из выражения:
, можно найти из выражения:
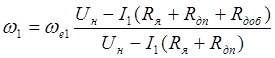 , где I1 и
, где I1 и ![]() - ток и скорость на естественной
характеристике , соответствующие заданному Мс.
- ток и скорость на естественной
характеристике , соответствующие заданному Мс.
4. Добавочные сопротивления в режиме динамического торможения можно определить из уравнения механической характеристики:
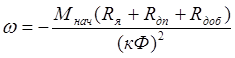 , где
, где ![]() -
скорость до начала торможения.
-
скорость до начала торможения.
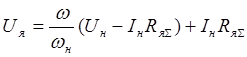
5.
Для определения
напряжения на якоре Uя, при котором механическая
характеристика при Rдоб=0 проходит через заданную точку ![]() при М=Мн, можно воспользоваться
выражением:
при М=Мн, можно воспользоваться
выражением:
 .
.
Задача №3. Определить параметры Т-образной схемы замещения асинхронного двигателя серии 4А по каталожным данным. Технические каталожные данные двигателей по вариантам приведены в табл.3 (приложение 1).
В таблице приняты следующие условные обозначения:
Рн - номинальная мощность двигателя, кВт;
U1н - номинальное фазное напряжение, В;
n0 - синхронная частота вращения, об/мин;
Sн – номинальное скольжение, %;
![]() - коэффициент полезного действия в
режиме номинальной мощности (100% нагрузка), %;
- коэффициент полезного действия в
режиме номинальной мощности (100% нагрузка), %;
cos![]() - коэффициент мощности в режиме
номинальной мощности;
- коэффициент мощности в режиме
номинальной мощности;
 - кратность пускового тока;
- кратность пускового тока;
 - кратность максимального
момента;
- кратность максимального
момента;
 - кратность минимального момента.
- кратность минимального момента.
Методические указания
Определение параметров схемы замещения асинхронного двигателя целесообразно производить в следующей последовательности (см. Мощинский Ю. А., Беспалов В.Я., Кирякин А. А. Определение параметров схемы замещения асинхронной машины по каталожным данным. Электричество. - 1998 - №4. – с.38-42).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.