











БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет «Информационных технологий и робототехники»
Кафедра «Электропривод и автоматизация промышленных установок
и технологических комплексов»
Лабораторная работа № 11 – ЭП
«МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ДВУХДВИГАТЕЛЬНОГО АСИНХРОННОГО ПРИВОДА»
Минск 2004 г.
ЦЕЛЬ РАБОТЫ: снятие механических характеристик для следующих режимов работы двухдвигательного привода: 1) работа обоих машин в двигательном режиме при различных сопротивлениях, 2) работа одной машины в двигательном режиме, а второй – в режиме противовключения, 3) работа одной машины в двигательном режиме, а второй – в режиме динамического торможения, 4) каскадное включение машин; сравнение опытных и расчетных характеристик; анализ возможностей двухдвигательного привода для получения устойчивых пониженных скоростей.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
В ряде случаев по экономическим и конструктивным соображениям, а также с целью интенсификации переходных процессов и получения пониженных скоростей применяют двухдвигательный привод, состоящий из двух электрических машин, которые соединены между собой механически. Двухдвигательные приводы применяются в металлургической промышленности (прокатные станы), в подъемно-транспортных установках, в специальных установках большой мощности (турбокомпрессоры) и других случаях.
Суммарный момент инерции двух двигателей половинной мощности меньше момента инерции одного двигателя единичной мощности, что при прочих равных условиях уменьшает время переходных процессов. Надежность двухдвигательного привода выше, чем однодвигательного, т.к. при выходе одного двигателя из строя, второй сможет обеспечить работу механизма с пониженной производительностью.
Особенно важным свойством двухдвигательного привода является возможность получения устойчивых пониженных, т.н. «ползучих», скоростей. Эти ценные качества двухдвигательного привода часто используются в напряженно работающих приводах ряда промышленных установок, особенно в приводах транспортных устройств автоматических линий и подъемных механизмов.
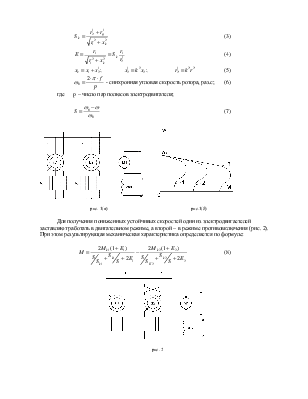
Одним из вариантов двухдвигательного привода является привод с двумя асинхронными электродвигателями с фазным ротором. Поскольку роторы обоих электродвигателей механически жестко связаны, то результирующий вращающий момент равен алгебраической сумме вращающих моментов отдельных электродвигателей. Так, если два электродвигателя работают в двигательном режиме (рис. 1а), то результирующая механическая характеристика (рис. 1б) может быть записана в виде (1).
 , (1)
, (1)
где МК1, МК2 – критические моменты электродвигателей Д1 и Д2, Нм;
SK1, SK2 – критические скольжения электродвигателей Д1 и Д2;
r1 – активное сопротивление обмотки статора асинхронного электродвигателя, Ом;
 , (2)
, (2)
где UФ – фазное напряжение, В;
 (3)
(3)
 (4)
(4)
![]() ;
; ![]() ;
; ![]() (5)
(5)
 -
синхронная угловая скорость ротора, раз.с; (6)
-
синхронная угловая скорость ротора, раз.с; (6)
где p – число пар полюсов электродвигателя;
 (7)
(7)
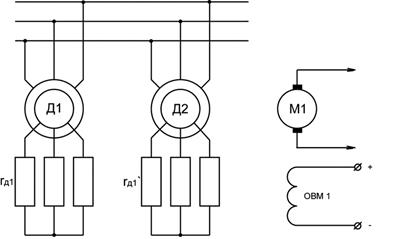
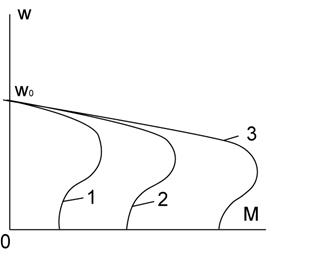
рис. 1(а) рис.1(б)
Для получения пониженных устойчивых скоростей один из электродвигаетелей заставляют работать в двигательном режиме, а второй – в режиме противовключения (рис. 2). При этом результирующая механическая характеристика определяется по формуле:
![]()
 (8)
(8)
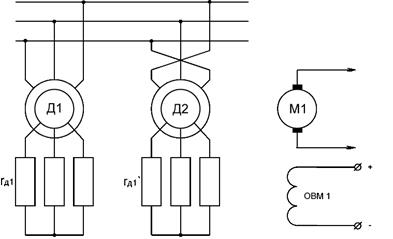
рис. 2
На рис. 3 приведены механические характеристики 1 и 2 каждого из электродвигателей Д1 и Д2 и результирующая характеристика 3.
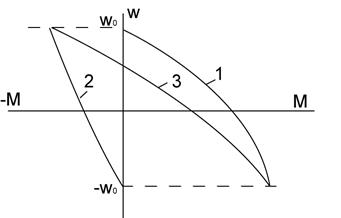
рис. 3
В качестве тормозного режима может использоваться также и режим динамического торможения, при этом первый двигатель остается работать в двигательном режиме, а второй переводится в режим динамического торможения (рис. 4).
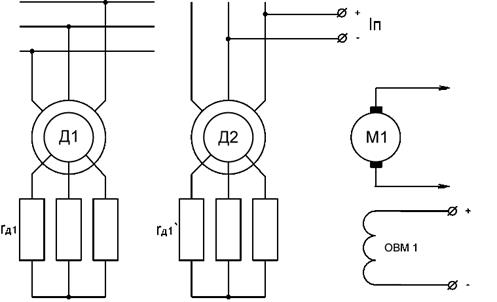
рис. 4
Результирующая механическая характеристика (рис. 5) привода для этого случая может быть записана таким образом:
 , (9)
, (9)
где Mqm(s) – механическая характеристика двигателя, работающего в режиме динамического торможения (кривая 2 на рис. 5).
Без учета насыщения стали характеристика динамического торможения выражается зависимостью (1,2)
 (10)
(10)
 ;
;  (11)
(11)
 , (12)
, (12)
где  -
индуктивное сопротивление намагничивания при холостом ходе двигателя, Ом;
-
индуктивное сопротивление намагничивания при холостом ходе двигателя, Ом;
UФ, I0 – соответственно, фазное напряжение и ток статора при холостом ходе, В, А;
х21 – приведенное индуктивное сопротивление ротора, Ом;
IЭКВ – действующее значение эквивалентного трехфазного тока обмотки статора, определяемое по формуле:
![]() , (13)
, (13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.