где а – коэффициент, зависящий от схемы соединения обмотки статора для постоянного тока IП (1,2);
w0 – синхронная скорость ротора, рад/с.
При учете насыщения стали механическая характеристика динамического торможения строится по точкам согласно (1,2).
В двухдвигательном приводе можно получить также пониженную скорость при каскадном включении двигателей (рис. 6).
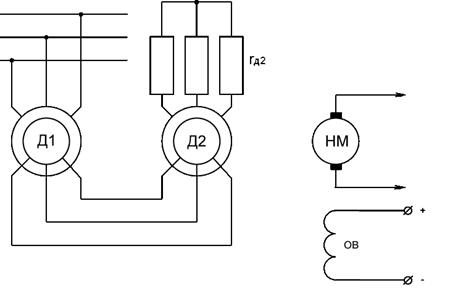
рис. 6
Синхронная скорость такого каскада равна:
 (14)
(14)
где Р1, Р2 – числа пар полюсов двигателей Д1 и Д2.
При одинаковых числах пар полюсов синхронная скорость каскада в два раза ниже синхронной скорости каждого из электродвигателей.
Если пренебречь нагрузочными потерями и токами намагничивания, то мощности и моменты, развиваемые каждым электродвигателем при их каскадном соединении, пропорциональны числам пар полюсов, т.е.:
 (15)
(15)
ОПИСАНИЕ УСТАНОВКИ
Лабораторная установка (рис. 7) состоит из двух асинхронных электродвигателей с фазными роторами Д1 и Д2, жестко сочлененными между собой, с нагрузочной машиной постоянного тока М1 и с тахогенератором ТГ, служащим для измерения скорости вращения привода. Для создания нагрузки на валу двухдвигательного привода служит нагрузочный агрегат, состоящий из машины постоянного тока М2 и электродвигателя Шраге-Рихтере ДЩР, которые имеют жесткую механическую связь. Скорость вращения нагрузочного агрегата измеряется тахогенератором, измерительный прибор которого установлен на стенде. В роторные цепи асинхронных двигателей могут быть включены добавочные (внешние) сопротивления R1, R2, R3 и R1`, R2`, R3`. Токи статоров двигателей Д1 и Д2 измеряются амперметрами, включенными в средние фазы обмоток, линейное напряжение – вольтметром, присоединенным к двум фазам двигателя Д1. Мощность, потребляемая двумя асинхронными двигателями, определяется по трехфазному ваттметру, имеющему цену деления 180 Вт/дел. Скорость вращения двухдвигательного привода контролируется по магнитоэлектрическому прибору μА с ценой деления С1=25 об/мин при положении рукоятки переключателя около ТГ вниз и С2=5 об/мин, при положении рукоятки переключателя около ТГ вверх.
Постоянный ток, необходимый для динамического торможения одного из асинхронных электродвигателей, получают от выпрямителя, имеющего зажимы (+) и (-). Величина постоянного тока изменяется с помощью автотрансформатора ЛАТР, установленного на входе выпрямителя.
Машины постоянного тока М1 и М2 имеют независимое возбуждение. Величины токов возбуждения в обмотках ОВМ1 и ОВМ2 изменяются с помощью автотрансформаторов ЛАТР1 и ЛАТР2, установленных на входе выпрямителей. Направления токов в обмотках возбуждения ОВМ1 и ОВМ2 можно изменять переключателями П1 и П2.
Величина и направление тока якорной цепи IЯ машин М1 и М2 определяется по амперметру магнитоэлектрической системы 25-0-25а.
Отключение якорной цепи машин М1 и М2 осуществляется с помощью рубильника Р1 (при положении стрелки амперметра 25-0-25 на нуле).
Включение рубильника Р1 выполняется при нулевом положении стрелки вольтметра, измеряющего разность напряжений машин М1 и М2.
Лабораторный стенд присоединяется к зажимам 1,2,3,0 щитка напряжением 380/220 В с помощью 4-проводного кабеля. Напряжение на стенд подается включением автоматического выключателя (АП50-3МТ), установленного на стенде.
Параметры асинхронных двигателей:
Д1 – МТ – 111 – 6:
РН=3,5 кВт ПВ=25% UН=380/220 В
I1Н=18,1/10,5 А Е2Н=137 В cosφН=0,70 х2=0,755 Ом
rН=0,72 Ом nН=915 об/мин I2Н=…… х2`=2,9 Ом
r1=2,18 Ом х1=2,03 Ом r2=0,628 Ом ке=1,99 I0=7,1 А cosφ0=0,06
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.