1 РЫЧАЖНЫЙ МЕХАНИЗМ ПОПЕРЕЧНО-СТРОГАЛЬНОГО СТАНКА
1.1 Структурный анализ
Цель структурного анализа – разложение рычажного механизма на структурные группы – группы Ассура. Группы Ассура – плоская кинематическая цепь с числом степеней свободы, равным нулю. Она содержит только низшие кинематические пары – вращательные и поступательные.
Число степеней свободы W определено по формуле Чебышева:
![]() , (1.1)
, (1.1)
где n - число подвижных звеньев, n = 5; p1 - число низших кинематических пар,
p1 = 7; p2 - число высших кинематических пар, p2 = 0.
![]()
Механизм имеет одно начальное звено.
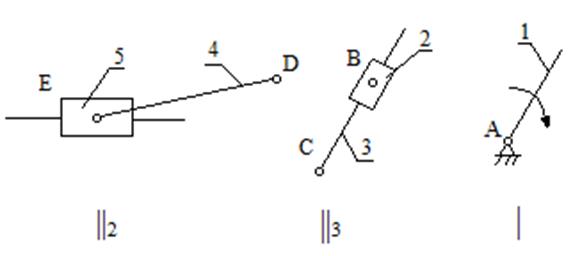
Рисунок 1.1 – Группы Ассура
Формула строения механизма:
I (1) – II3 (2,3) – II2 (4,5);
Механизм поперечно-строгального станка второго класса.
1.2 Кинематический анализ
1.2.1 Планы положений
План положений - кинематическая схема механизма, выполненная в масштабе.
Масштаб плана положений μl определён из формулы, мм/м [1]:
 (1.2.1)
(1.2.1)
Длины отрезков, изображающих длины звеньев:
![]() (1.2.2)
(1.2.2)
![]() (1.2.3)
(1.2.3)
![]() (1.2.4)
(1.2.4)
![]() (1.2.5)
(1.2.5)
![]() (1.2.6)
(1.2.6)
![]() (1.2.7)
(1.2.7)
Вычерчена окружность радиуса AB и разделена на 12 частей. Из точки А по вертикали вниз проведен y1 и поставлена точка C, а по вертикали вверх проведен у2 и проведена направляющая x-x. Из точки С через точку B проведена прямая CD. Из точки D проведена прямая DE так, что точка E оказалась на направляющей x-x.
1.2.2 Планы скоростей
Для построения плана скоростей составлена система векторных уравнений. Точка B кинематической схемы принадлежит трем звеньям. Точки B1 и B2 движутся как одно целое. Точка B3 принадлежит кулисе 3 и меняет положение на звене в зависимости от угла поворота кривошипа. Кинематика точки B3 и будет искомой:
 (1.2.8)
(1.2.8)
Линейная скорость:
![]() B1 =
B1 = ![]() B2 = w1lAB
=
10×0,08
= 0,8 м/с. (1.2.9)
B2 = w1lAB
=
10×0,08
= 0,8 м/с. (1.2.9)
Масштаб плана скоростей:
m![]() = pb1/
= pb1/![]() B1 = 60/0,08 =
75 мм/(м×с-1).
(1.2.10)
B1 = 60/0,08 =
75 мм/(м×с-1).
(1.2.10)
Из
полюса p проведен вектор pb1 = 60 мм перпендикулярно AB
в сторону вращения. Из его конца проведено направление
![]() B3B2 параллельно звену CD. Из полюса p
(так как
B3B2 параллельно звену CD. Из полюса p
(так как ![]() C =
0) проведено направление
C =
0) проведено направление ![]() B3C
перпендикулярно CD до пересечения с направлением
B3C
перпендикулярно CD до пересечения с направлением ![]() B3B2.
В искомую точку b3 направлены стрелки искомых векторов.
B3B2.
В искомую точку b3 направлены стрелки искомых векторов.
Полученные длины отрезков:
pb3 = 35мм;
b3b2 = 49 мм.
Положения точек d и s3 найдены из пропорций:
pd = pb3×CD/B3C = 35×235/139 = 59,2 мм;
ps3 = 0,5×59,2 = 29,6 мм.
Точка d получена на продолжении pb3, точка s3 — посередине pd.
Линейные скорости:
![]() B3
= pb3/m
B3
= pb3/m![]() = 35/75 = 0,47 м/с;
(1.2.11)
= 35/75 = 0,47 м/с;
(1.2.11)
![]() D
= 60/75 = 0,8 м/с; (1.2.12)
D
= 60/75 = 0,8 м/с; (1.2.12)
![]() S3 = 30/75 =
0,4 м/с; (1.2.13)
S3 = 30/75 =
0,4 м/с; (1.2.13)
![]() B3B2 = 49/75
= 0,65 м/с. (1.2.14)
B3B2 = 49/75
= 0,65 м/с. (1.2.14)
Угловая скорость кулисы:
w3 = ![]() B3C/lB3C
=
B3C/lB3C
= ![]() B3/(B3C/ml) = 0,47/(139/200)
= –0,67 с-1. (1.2.15)
B3/(B3C/ml) = 0,47/(139/200)
= –0,67 с-1. (1.2.15)
Направление w3 — по часовой стрелке.
Построен план скоростей диады 4–5. С диадой 2–3 ее связывает точка D, кинематика которой определена. Система векторных уравнений диады 4–5 аналогична (1.2.8):
 (1.2.16)
(1.2.16)
Из
точки d проведено направление ![]() ED
перпендикулярно DE. Из полюса p проведено направление x–x
до пересечения с направлением
ED
перпендикулярно DE. Из полюса p проведено направление x–x
до пересечения с направлением ![]() ED
в точке e. Длины отрезков:
ED
в точке e. Длины отрезков:
pe = 58,5 мм;
de = 5 мм.
Точку s4 находим из пропорции ds4 = 0,5de = 0,5×5 = 2,5 мм. Отрезок ps4 = 59 мм.
Линейные скорости:
![]() E = 58,5/75 = 0,78
м/с; (1.2.17)
E = 58,5/75 = 0,78
м/с; (1.2.17)
![]() ED
= 5/75 = 0,07 м/с; (1.2.18)
ED
= 5/75 = 0,07 м/с; (1.2.18)
![]() S4
= 59/75 = 0,79 м/с. (1.2.19)
S4
= 59/75 = 0,79 м/с. (1.2.19)
Угловая
скорость шатуна w4 =
![]() ED/lDE
= 0,07/0,4 = –0,18 c-1. (1.2.20)
ED/lDE
= 0,07/0,4 = –0,18 c-1. (1.2.20)
Направление w4 — по часовой стрелке.
1.2.3 План ускорений
План ускорений построен также начиная с диады 2–3. Система векторных уравнений:
 (1.2.21)
(1.2.21)
Нормальные
ускорения ![]() и
и ![]() — центростремительные, направлены к
центрам вращения А и С. Векторы, известные по величине и
направлению:
— центростремительные, направлены к
центрам вращения А и С. Векторы, известные по величине и
направлению:
aB1 = aB2 = w12lAB = 102×0,08 = 8 м/с2; (1.2.22)
![]() =
= ![]() /lB3C
= 0,472/(140/200) = 0,32 м/с2.
(1.2.23)
/lB3C
= 0,472/(140/200) = 0,32 м/с2.
(1.2.23)
Направление
кориолисова ускорения получено поворотом вектора относительно
ускорения ![]() B3B2 на
90о в сторону w3 (по
часовой стрелке).
B3B2 на
90о в сторону w3 (по
часовой стрелке).
Его модуль:
![]() =
2w3
=
2w3![]() B3B2 =
2×0,67×0,65 = 0,87 м/с2.
(1.2.24)
B3B2 =
2×0,67×0,65 = 0,87 м/с2.
(1.2.24)
Масштаб плана ускорений ma = pb1/aB1 = 160/8 = 20 мм/(м/с2). (1.2.25)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




