Длины отрезков на плане ускорений:
b1k = ![]() ma = 0,87×20 = 17,4 мм;
ma = 0,87×20 = 17,4 мм;
pn1 = ![]() ma = 0,32×20 = 6,4 мм.
ma = 0,32×20 = 6,4 мм.
Из
полюса p
проведен вектор pb1
= 160 мм параллельно AB к точке A. Из его конца перпендикулярно BC
отложен отрезок b1k = 17,4 мм, из конца которого
проведено направление относительного ускорения параллельно звену CD.
Решая второе уравнение системы, из полюса p отложен отрезок pn1
= 6,4 мм параллельно звену CD к центру вращения C. Из конца
отрезка pn1
проведено
направление, перпендикулярное звену CD, до пересечения с направлением ![]() в точке b3.
в точке b3.
Полученные длины отрезков:
pb3 = 112,5 мм;
n1b3 = 113 мм.
Точки d и s4 найдены из пропорций:
pd = pb3CD/B3C = 112,5×235/139 = 190,2 мм;
ps3 = 0,5×190,2 = 95,1 мм.
Линейные ускорения:
aВЗ = πb3/μа = 112,5/20 = 5,6 м/с2; (1.2.26)
![]() = n1b3/μа
= 113/20 = 5,7 м/с2; (1.2.27)
= n1b3/μа
= 113/20 = 5,7 м/с2; (1.2.27)
aD = πd/μа = 190,2/20 = 9,5 м/с2; (1.2.28)
aS3 = πs3/μа = 95,1/20 = 4,8 м/с2. (1.2.29)
Угловое ускорение кулисы:
![]() = 5,7/(140/200)
= –8,1 с-2. (1.2.30)
= 5,7/(140/200)
= –8,1 с-2. (1.2.30)
Направление ε3 — по часовой стрелке.
Для построения плана ускорений диады 4–5 составлена система векторных уравнений для диады 2-го вида:
 (1.2.31)
(1.2.31)
Нормальная составляющая ![]() =
= ![]() /lDE = 0,072/0,4
= 0,01 м/с2. (1.2.32)
/lDE = 0,072/0,4
= 0,01 м/с2. (1.2.32)
Длина
отрезка dn2 = ![]() ma
= 0,01×20
= 0,2 мм. Из конца вектора pd отложен отрезок
dn2 = 0,2 мм параллельно ED в сторону точки D.
Далее ему перпендикулярно
проведено направление
ma
= 0,01×20
= 0,2 мм. Из конца вектора pd отложен отрезок
dn2 = 0,2 мм параллельно ED в сторону точки D.
Далее ему перпендикулярно
проведено направление ![]() . Из полюса p
проведено направление
. Из полюса p
проведено направление ![]() параллельно направляющей x–x. Точка пересечения
направлений e определяет длины отрезков и величины векторов.
параллельно направляющей x–x. Точка пересечения
направлений e определяет длины отрезков и величины векторов.
Полученные длины отрезков:
ps4 = 192 мм;
n2e = 2 мм;
pe = 192 мм.
Линейные ускорения:
aE = 192/20 = 9,6 м/с2; (1.2.33)
aS4 = 192/20 = 9,6 м/с2; (1.2.34)
![]() = 2/20 = 0,1 м/с2. (1.2.35)
= 2/20 = 0,1 м/с2. (1.2.35)
Угловое ускорение шатуна:
e4 = ![]() /lED = 0,1/0,4
= 0,25 с-2 (против часовой стрелки). (1.2.36)
/lED = 0,1/0,4
= 0,25 с-2 (против часовой стрелки). (1.2.36)
1.2.4 Метод кинематических диаграмм
Метод кинематических диаграмм – графический метод кинематического анализа.
Диаграмма перемещений SC = SC (t) построена в масштабах µs и µt. На
оси абсцисс отложено 12 равноотстоящих отрезков общей длиной ![]() = 240 мм. Масштаб времени, мм/c [1]:
= 240 мм. Масштаб времени, мм/c [1]:
 (1.2.37)
(1.2.37)
Первая точка диаграммы перемещений - точка 9, следующая - точка 10, т.к. кривошип вращается по часовой стрелке. Перемещение ползуна E отложено в масштабе: µS = µl. Максимальное перемещение поршня – это ход резца H=2lAB.
Диаграмма скорости VC = VC(t) построена методом графического дифференцирования. На каждом участке диаграммы SC = SC(t) кривая заменена стягивающей прямой – хордой. P1 – полюс. P18 – отрезок дифференцирования, принят равным 40 мм. Из полюса P1 проведены лучи параллельные хордам кривой на графике SC = SC(t) до пересечения с осью ординат. Эти отрезки изображают скорость на середине соответствующего участка. На серединах всех участков про-ведены отрезки 9-10`, 9-11` и т.д. они соединены плавной кривой, эта кривая - диаграмма VC = VC(t). Масштаб диаграммы скоростей, мм/м·с-1 [1]:
 (1.2.38)
(1.2.38)
Аналогично выполнено повторное дифференцирование для построения диаграммы ускорений aC = aC(t) в масштабе, мм/м·с-1 [1]:
 (1.2.39)
(1.2.39)
1.2.5 Аналитический метод кинематического анализа
Исходные данные:
угловая скорость кривошипа ω1 =-10 рад/с;
длина звена АВ: lAB = l1 = 0,08 м;
длина звена CD lCD = l3 = 1,17 м; длина между точками A и C y1 = l4 = 0,65 м;
центр масс звена CD lCS3 = 0,5 lCD = 0,59 м;
угол поворота кривошипа φ1 = 60˚; шаг = 30˚.
Алгоритм расчёта кривошипно-кулисного механизма
Расчетная
схема механизма представлена на рис. 1.2. Длины звеньев заменены векторами ![]() ,
, ![]() и
и ![]() .
.
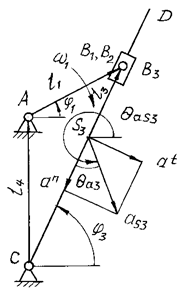
Рисунок 1.2 – Расчетная схема кривошипно-кулисного механизма
Особенностью механизма является то, что точка В принадлежит одновременно трем звеньям. Точка кривошипа В1 и точка В2 камня кулисы имеют общую ось и одинаковые кинематические параметры. Точка В3 на кулисе меняет свое положение в зависимости от координаты кривошипа. Ее кинематические параметры переменны.
Координата точки В3:
![]() (1.2.40)
(1.2.40)
![]()
Угловая координата кулисы:
![]() (1.2.41)
(1.2.41)
![]()
Угловая скорость кулисы:
![]() (1.2.42)
(1.2.42)
![]()
Относительная скорость:
![]() (1.2.43)
(1.2.43)
![]()
Кориолисово ускорение:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.