
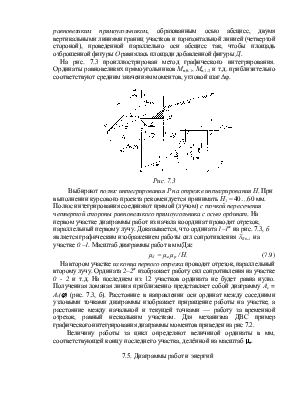







7. Расчет маховика
7.1. Задачи динамического анализа
При кинематическом анализе рычажного механизма угловая
скорость кривошипа ![]() условно принята постоянной.
В действительности кинематические параметры являются функцией действующих в
механизме внешних сил и масс подвижных звеньев. В технологических машинах силы
сопротивления действуют в режиме рабочего хода, то есть при движении выходного
звена только в одном направлении; при холостом ходе чаще всего
условно принята постоянной.
В действительности кинематические параметры являются функцией действующих в
механизме внешних сил и масс подвижных звеньев. В технологических машинах силы
сопротивления действуют в режиме рабочего хода, то есть при движении выходного
звена только в одном направлении; при холостом ходе чаще всего ![]() .
.
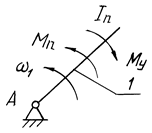
Наличие нескольких цилиндров и изменение давлений в
них в соответствии с индикаторной диаграммой приводит к изменению усилий на
поршни механизмов двигателей внутреннего сгорания и компрессоров. Переменные
силы способствуют колебаниям угловой скорости кривошипа, поэтому заданную
угловую скорость следует считать средней угловой скоростью, то есть ![]() . При установившемся режиме
. При установившемся режиме ![]() принимает различные значения в пределах от
принимает различные значения в пределах от
![]() до
до ![]() . Колебания
скорости главного вала вызывают дополнительные динамические нагрузки, вследствие
чего снижается долговечность и надежность машин. Наличие таких нагрузок легко
поясняется следующей логической цепочкой.
. Колебания
скорости главного вала вызывают дополнительные динамические нагрузки, вследствие
чего снижается долговечность и надежность машин. Наличие таких нагрузок легко
поясняется следующей логической цепочкой.
Если ![]() , то
, то
![]() и
и ![]()
Моменты сил инерции ![]() могут иметь большие значения и существенно нагружать
рычажные звенья. Инерционные нагрузки невозможно устранить, но их можно
ограничить безопасными для работоспособности механизма значениями. Для этого на
кривошипе закрепляется добавочная масса, называемая маховиком.
Подбирая его момент инерции, можно обеспечить вращение кривошипа с заданным
коэффициентом неравномерности:
могут иметь большие значения и существенно нагружать
рычажные звенья. Инерционные нагрузки невозможно устранить, но их можно
ограничить безопасными для работоспособности механизма значениями. Для этого на
кривошипе закрепляется добавочная масса, называемая маховиком.
Подбирая его момент инерции, можно обеспечить вращение кривошипа с заданным
коэффициентом неравномерности:
 .
(7.1)
.
(7.1)
Для
каждого вида машин имеется своя допустимая величина ![]() ,
выработанная практикой, например, для двигателей внутреннего сгорания и
компрессоров
,
выработанная практикой, например, для двигателей внутреннего сгорания и
компрессоров ![]() =1/80…1/150.
=1/80…1/150.
Задачами динамического синтеза и анализа рычажного механизма являются:
- определение момента инерции маховика, его конструктивных размеров и массы;
-
построение диаграммы ![]() ;
;
-
построение диаграммы ![]()
7.2. Краткие теоретические сведения
Для облегчения динамических расчётов многозвенный механизм заменяют одномассовой динамической моделью, состоящей из одного звена и стойки. Такая кинематическая цепь называется начальным механизмом I класса. Тогда уравнение движения механизма можно заменить тождественным ему уравнением движения одного звена, называемого звеном приведения.
|
Рис. 7.1 |
Звено приведения — одно из звеньев исследуемого механизма, имеющее ту же скорость, что
и в реальном механизме. В механизме ДВС, как и во многих других механизмах,
звено приведения - вращающееся (кривошип, рис. 7.1). Оно будет обладать приведенным
моментом инерции Iп и на него действует приведенный момент
сил ![]() .
.
Приведенные силы и моменты сил являются эквивалентом всех сил, действующих на звенья механизма, а приведенные массы и моменты инерции — эквивалентом инертности механизма.
Приведенный момент сил Mп(либо приведенная сила Fп) определяется из равенства мощности звена приведения сумме мощностей сил, действующих на звенья механизма.
Приведенный момент ![]() равен уравновешивающему моменту
равен уравновешивающему моменту ![]() по модулю и противоположен по направлению.
по модулю и противоположен по направлению.
Приведенный момент инерции ![]() (приведенная масса
(приведенная масса ![]() )
определяется из равенства кинетической энергии звена приведения сумме
кинетических энергий звеньев механизма:
)
определяется из равенства кинетической энергии звена приведения сумме
кинетических энергий звеньев механизма:
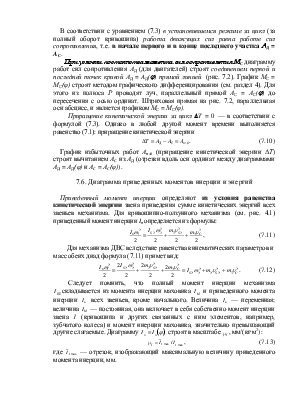
Задачи динамического анализа и синтеза решаются на основе уравнения движения механизма под действием заданных сил в энергетической форме - уравнения кинетической энергии:
![]() ,
(7.2)
,
(7.2)
где
![]() - работа движущих
сил, Дж;
- работа движущих
сил, Дж; ![]() - работа сил полезных
сопротивлений (без учета сил трения); Т - текущее
значение кинетической энергии, Дж; Т0 - кинетическая энергия в начальный момент времени (при
- работа сил полезных
сопротивлений (без учета сил трения); Т - текущее
значение кинетической энергии, Дж; Т0 - кинетическая энергия в начальный момент времени (при ![]() );
); ![]() - приращение кинетической энергии.
- приращение кинетической энергии.
В период установившегося движения ![]() = 0 и в
соответствии с формулой (7.2)
= 0 и в
соответствии с формулой (7.2)
![]() =
= ![]() .
(7.3)
.
(7.3)
Величина
![]() - переменная и
зависит от положения звена приведения. Полное приращение можно представить в
виде суммы:
- переменная и
зависит от положения звена приведения. Полное приращение можно представить в
виде суммы:
![]() ,
(7.4)
,
(7.4)
где
![]() - приращение
кинетической энергии начального звена вместе с маховиком и другими звеньями,
например, зубчатой передачей;
- приращение
кинетической энергии начального звена вместе с маховиком и другими звеньями,
например, зубчатой передачей;
![]() - приращение
кинетической энергии всех подвижных звеньев, кроме кривошипа.
- приращение
кинетической энергии всех подвижных звеньев, кроме кривошипа.
Кинетическая энергия звеньев механизма определяется через момент инерции, которой также можно представить как сумму составляющих;
![]() , где
, где
![]() - момент инерции
начального звена вместе с маховиком, кг·м2, практически это момент
инерции маховика, так как моменты инерции других элементов (коленчатого вала,
зубчатого колеса) намного меньше;
- момент инерции
начального звена вместе с маховиком, кг·м2, практически это момент
инерции маховика, так как моменты инерции других элементов (коленчатого вала,
зубчатого колеса) намного меньше;
![]() - приведенный
момент инерции всех подвижных звеньев, кроме начального.
- приведенный
момент инерции всех подвижных звеньев, кроме начального.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.