|
Объект моделирования |
Электрическая система |
|
Рассеиватель энергии |
Резистор |
|
Модель |
Сопротивление |
|
Накопитель электрической энергии |
Конденсатор (электрический) |
|
Модель |
Ёмкость (электрическая) |
|
Накопитель магнитной энергии |
Катушка индуктивности |
|
Модель |
Индуктивность |
Описание математических методов
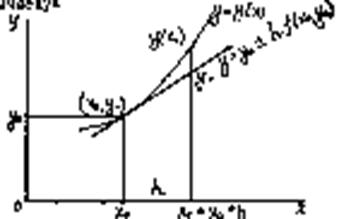 |
Этот метод относится к группе одношаговых методов, в которых для расчёта точки (xi+1, yi+1) требуется информация только о последней вычисленной точке (xi, yi). Метод допускает простую геометрическую интерпретацию.
Предположим, что известна точка (xi, yi); определяется уравнением касательная к этой кривое проходящая через точку y = yi + y’i (x - xi), а так как y’i = f(xi, yi) и xi+1 = xi + h, то yi+1 = yi + hf(xi, yi). Для оценки погрешности метода на одном шаге сетки разложим точное решение в ряд Тейлора в окрестности узла xi.
Y(xi+1) = y(xi + h) = y(xi) + y’(xi)h + 0(h*h) = y(xi) + hf(xi, yi) + 0 (h*h) (2)
Сравним (I) и (2). Сравнение показывает, что они согласуются до членов первого порядка по h, а погрешность формулы (1) равно 0(h2). Если расчётные формулы численного метода согласуются в ряд Тейлора до членов порядка h, то число р называют порядком метода. Т.о. метод Эйлера - метод первого порядка.
Метод Эйлера легко обобщается на случай нормальных систем диф. уравнений. Пусть требуется найти решение системы диф. уравнений.
y’i = f1(x, y1, …, yn),
………………………
…
y’n = fn(x, y1, …, yn),
удовлетворяющих начальным условиям y1(x0) = y10, y2(x0) = y20, …, yn(x0) = yn0 или в векторной форме Y’ = f(x, Y), Y(x0) = Y0.
Y(x) = {y1(x), y2(x), …, yn(x)}, Y0 = {y10, y20, …, yn0}.
Входные параметры: N – порядок системы, Х - начальное значение Хо, Y – массив из N чисел, содержащий начальное значение у; Н - значение шага; Р - имя внешнем подпрограммы SUBROUTINE P(x, y, f), вычисляющей значения правых частей уравнений системы по заданным Х и Y и размещающий их в элементах. массива F: F - рабочий массив размерности содержащий значения f(X,У).
Выходные параметры: Х – значение x0 + h, Y – массив из М чисел, содержащий приближённое решение в точке x0 + h.
(Y(I) = Y1 = yi(x0 + h), I = 1, 2, …, N )
Перед обращением к подпрограмме EYLER необходимо:
- составить подпрограмму P(X, Y, F) вычисления правых частей уравнений системы;
- описать имя Р оператором EXTERNAL;
- описать размерность массивов Y и F;
присвоить фактические значения параметрам N, Х, Y, Н. Следует пометь, что входные параметры Х и Y являются одновременно и выходными.
Листинг программы дан в приложении I.
2. Метод Гаусса для решения системы линейных уравнений, Методом Гаусса называют точный метод решения невырожденной системы линейных уравнений, состоящий в том, что последовательным исключением неизвестных систем
приводят к эквивалентной системе с треугольной матрицей
![]()
![]()
решение которой находят по рекуррентным формулам

Один из алгоритмов описан в подпрограмме SUBROUTINE SIMQ (A, B, N, KS).
Текст подпрограммы дан в приложении 3.
Входные параметры: N – целое положительное число, равное порядку n системы; А – массив из N*N действительных чисел, содержащий матрицу коэффициентов системы А(1) = а11, А(2) = а21, ... . А(N) = an, A(N+1) = a12, A(N*N) = ann; В – массив из действительных чисел, содержащий столбец свободных членив системы B(1) = b1, B(2) = b2, ... . B(N) = bn.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.