По характері кріплення до руки ПР всі ЗП діляться на чотири групи. Незмінювані ЗП - пристрою, що є невід'ємною частиною конструкції ПР, заміна яких не передбачається.
Змінні ЗП - самостійні вузли з базовими поверхнями для кріплення до руки ПР, що не передбачають швидкої заміни (наприклад, установка на фланці за допомогою декількох гвинтів ). Швидкозмінні ЗП - конструкція базових поверхонь для кріплення ЗП до ПР забезпечує їхню швидку зміну (наприклад, виконання у вигляді байонетного замку). Придатні для автоматичної зміни ЗП - конструкція базових поверхонь забезпечує можливість їхнього автоматичного закріплення на руці ПР.
12.7 Розрахунок утримуючих пристроїв
Розрахунок механічних захватних пристроїв включає перевірку на міцність деталей захвату. Крім того, необхідно силу привода захватного пристрою, сили в місцях контакту заготовки та губок, перевірити відсутність ушкоджень заготовки під час утримування, можливість утримання захватом заготовки під час маніпулювання, особливо в момент різких ЗПпинок.
Відношення між силою Р приводу, силами F на губках або моментом М на губках утримуючого пристрою виявляють з умови статичної рівноваги.
Для даної деталі вибираємо розрахункову схему з клиновим механізмом, яка зображена на рисунку 12.2 .
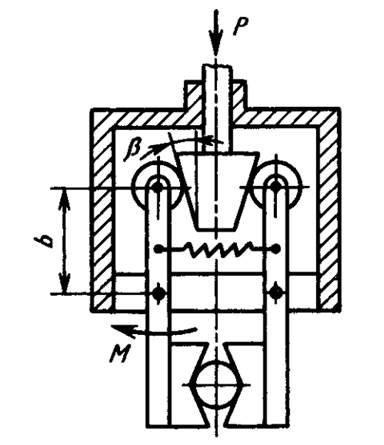
Рисунок 12.2 - Розрахункова схема з клиновим механізмом
Сили утримування, які необхідні для утримання заготівки під час її переміщення Q розраховуються по формулі 12.1:
![]() ;
(12.1)
;
(12.1)
![]() Н, де
m – маса
заготівки, кг;
Н, де
m – маса
заготівки, кг;
g – прискорення вільного падіння, м/с2;
К1 – коефіцієнт безпеки, значення якого залежить від умови використання промислового роботу та розташування інших елементів РТК;
K2 – коефіцієнт , який залежить від максимального прискорення А, з яким робот переміщує заготівку, яка в свою чергу закріплена у його захваті;
К3 – коефіцієнт передачі , який залежить від конструкції захвату та розташування в ньому заготівки.
R1 , R2 - сила захвату на кожній губці, яка зображені на рисунку 12.3 буде розраховуватись:
 ;
(12.2)
;
(12.2)
 Н;
Н;
 ; (12.3)
; (12.3)
 Н, де
l – розмір
захвату;
Н, де
l – розмір
захвату;
с – відстань від точки прикладання навантаження до губки захвату яка розглядається.
Розрахуємо реакцію на n-у губку захвату Rn за формулою 12.4 :
![]() ;
(12.4)
;
(12.4)
![]() Н,
Н,
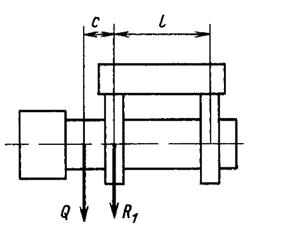
Рисунок 12.3 - Схема для визначення сил, які діють на губці від сили тяжіння
Розрахуємо силу захоплення Ni для схеми яка зображена на рис. 12.4 за формулою 12.5:
 ; (12.5)
; (12.5)
![]()
 Н;
Н;
 Н,
Н,
де
![]() - кут між проекцією Rn
на
площину та силою Ni,
0
;
- кут між проекцією Rn
на
площину та силою Ni,
0
;
![]() - коефіцієнт тертя
губки захвату з заготівкою.
- коефіцієнт тертя
губки захвату з заготівкою.
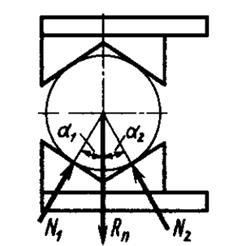
Рисунок 12.4 - Схема для розрахунку сили захоплювання заготівок губками
Далі необхідно розрахувати утримуючий момент для і-ї губки Мі за формулою:
 ; (12.6)
; (12.6)
![]()
![]() , де
k – кількість
точок контакту;
, де
k – кількість
точок контакту;
ai, сi – відстань від точки повороту губки до і-ї точки контакту, мм;
φі – кут контакту, 0;
Для захватного пристрою з клиновим механізмом сила привода розраховується за формулою 12.7:
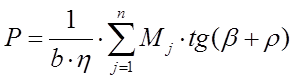 ,
(12.7)
,
(12.7)
де
![]() -
приведений кут тертя, який враховує опір осей підойми, 0;
-
приведений кут тертя, який враховує опір осей підойми, 0;
n – кількість губок захвату;
![]() - ККД шарнірів;
- ККД шарнірів;
![]() - кут клина, 0.
- кут клина, 0.
Для даного типа деталі необхідно вибрати симетричне розташування губок, це означає, що М1=М2=М. Сила привода для цієї схеми розраховується таким чином:
 (12.8)
(12.8)
 Н,
Н,
Виходячи з цієї нерівності можна зробити висновок, що сила захватного пристрою повинна бути більшою ніж 7,8 Н.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.