По числу ступенів рухливості ПР мають від трьох до шести й більше ступенів рухливості. Принципово трьох ступенів рухливості досить для висновку кінцевої крапки маніпулятора в будь-яку крапку простору, що обслуговує роботом. Ще три ступені рухливості необхідні, щоб у цій крапці здійснювати будь-яку кутову орієнтацію загарбного пристрою або інструмента. Більше шести ступенів рухливості необхідно при обході яких-небудь перешкод.
12.3.2 Вантажопідйомність
ПР діляться на надлегкі (до 1 кг), легені (до 10 кг), середні (до 200 кг), важкі (до 1000 кг) і надважкі (понад 1000 кг). Конструктивне виконання. ПР виконують убудованими в устаткування, підвісними й підлогові.
12.3.3 Тип систем керування
По типу систем керування ПР діляться на три роди: програмні, адаптивні й інтелектні (з елементами штучного інтелекту). Всі вони мають властивість швидкого перепрограмування, причому в програмних роботів перепрограмування виробляється людиною, після чого робот діє автоматично. У адаптивних ПР основою програми дій робота заставляються людиною, але сам робот має властивість у певних рамках автоматично перепрограмовуватися в ході технологічного процесу залежно від обстановки. Інтелектним роботам завдання на роботу вводиться людиною в більш загальній формі, а сам робот має можливість приймати рішення й планувати свої дії в невизначеній і мінливій обстановці, щоб виконати закладене в його пам'ять завдання.
12.4 Структура промислових роботів
ПР складається з виконавчого пристрою у вигляді маніпулятора й пристрою програмного керування. Маніпулятор ПР призначений для виконання рухових функцій при переміщенні об'єктів у просторі і являє собою багатоланковий механізм із розімкнутим кінематичним ланцюгом.
Конструктивно маніпулятор складається з несучих конструкцій, виконавчих механізмів, загарбного пристрою, приводу з передавальними механізмами й пристрою пересування. Пристрій керування ПР необхідно для формування й видачі керуючих впливів маніпулятору відповідно до керуючої програми й конструктивно складається з системи керування, інформаційно-вимірювальної системи із пристроями зворотного зв'язку й системи зв'язку. Несучі конструкції служать для розміщення всіх пристроїв й агрегатів ПР, а також для забезпечення необхідної міцності й твердості маніпулятора. Несучі конструкції виконують у вигляді підстав, корпусів, стійок, рам, візків, порталів і т.п.
Виконавчий механізм - це сукупність рухливо з'єднаних ланок маніпулятора, призначених для впливу на об'єкт маніпулювання або оброблюване середовище. Загарбний пристрій - кінцевий вузол маніпулятора, що забезпечує захоплювання й утримання в певнім положенні об'єкта маніпулювання. Привід призначений для перетворення енергії яка підводиться в механічний рух ланок виконавчого механізму відповідно до сигналів, що надходять із пристрою керування.
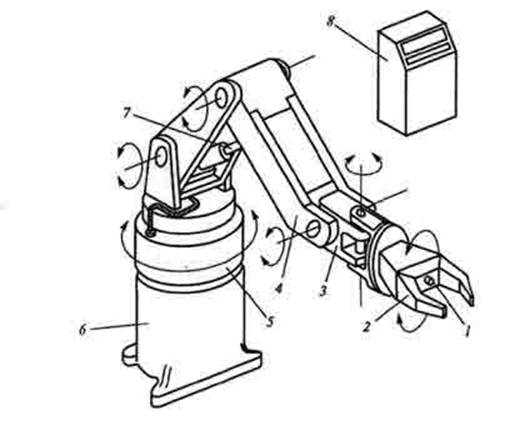
1 - датчик зворотного зв'язку; 2 - загарбний пристрій; 3 - кисть; 4 - рука маніпулятора; 5 - колона; 6 - несуча конструкція (підстава); 7 - привід руки; 8 - блок керуючого пристрою з пультом
Рисунок 12.1 - Конструкція промислового робота
Пристрій пересування служить для переміщення маніпулятора або ПР у цілому в необхідне місце робочого простору й конструктивно складається з ходової частини й приводних пристроїв. Система керування необхідна для безпосереднього формування й видачі керуючих сигналів і складається з пульта керування, запам'ятовувального пристрою, обчислювального пристрою, блоків керування приводами маніпулятора й технологічним устаткуванням.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.