





Министерство образования и науки Украины
Национальный аэрокосмический университет
им. Н. Е. Жуковского «ХАИ»
кафедра 301
Лабораторная работа №4
«Центральное гироскопическая вертикаль типа ЦГВ»
Выполнила группа 134
Проверил
Гордин А.Г.
Харьков 2006
Цель работы:
1. Экспериментально исследовать работоспособность и характеристики ЦГВ и отдельных её подсистем.
2. На основании экспериментальных данных определить коэффициенты передачи по каналам тангажа и крена, необходимые для проектирования систем управления самолёта.
3. Оценить погрешности измерения при помощи ЦГВ углов крена и тангажа, необходимые для алгоритмической их компенсации при реализации системы управления.
Умения, на которые направлено выполнение лабораторной работы:
· проведение экспериментальных исследований проверки теоретических положений и согласование их с экспериментом;
· осуществление разделения каналов ЦГВ по режимам стабилизации и коррекции;
· анализ взаимного влияния углового положения ЛА по крену и тангажу на точность выдачи информации в систему управления;
· анализ технического состояния автономной измерительной системы и оценка её работоспособности;
· составление и анализ структурных схем различных каналов, входящих в состав исследуемого объекта;
· определение характеристик измерительной системы, необходимых в качестве исходных данных для проектирования системы управления.
Теоретическое введение
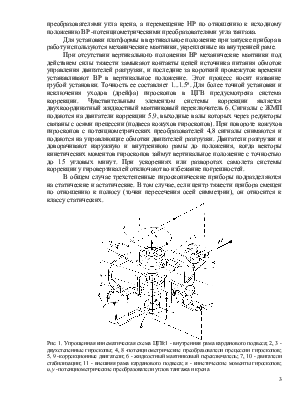
На основе принципа гироскопической силовой стабилизации построена центральная гироскопическая вертикаль (ЦГВ) (рис. 1). Основу ЦГВ составляют два одноосных гиростабилизатора, обеспечивающих неизменное положение внутренней рамы 1 в пространстве. Во ВР располагаются два двухстепенных гироскопа 2,3, кинетические моменты которых устанавливаются в вертикальной плоскости, но в противоположных направлениях.
Это исключает появление реактивных моментов при запуске гироскопов. Внутренняя рама устанавливается внутри наружной рамы 11, оси подвеса которых через редукторы связаны с соответствующими двигателями стабилизации 7,10. На кожухе каждого из гироскопов имеется потенциометрическии преобразователь угла прецессии 4,8. Гироскопы служат индикаторами внешних возмущающих моментов. Оси прецессии гироскопов расположены взаимно перпендикулярно, поэтому согласно закону прецессии на возмущающий момент, действующий, например, относительно оси подвеса НР, будет реагировать только один из них. Другой гироскоп будет реагировать на возмущающий момент, действующий относительно подвеса ВР. Таким образом, каждый из гироскопов совместно с подвесом наружной или внутренней рам может быть рассмотрен как трехстепенной гироскоп, а совместно с двигателем разгрузки - как одноосный гиростабилизатор. Так как ВР или платформа остается неподвижной в пространстве, то ее исходное угловое положение принимают за начало отсчета. При этом перемещение корпуса прибора по отношению к исходному положению НР фиксируется потенциометрическими преобразователями угла крена, а перемещение НР по отношению к исходному положению ВР -потенциометрическими преобразователями угла тангажа.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.