




Федеральное агентство по образованию
Федеральное государственное образовательное учреждение
Высшего профессионального образования
Сибирский федеральный университет
Политехнический институт
Кафедра «Теория и конструирование механических систем»
Лабораторная работа № 1
Структурный анализ и метрический синтез рычажных механизмов
Выполнил: студент группы АТ65-1
специальность 190603
шифр
Попов В. В.
Проверил: доцент, к.т.н.
Мерко М. А.
Красноярск, 2007
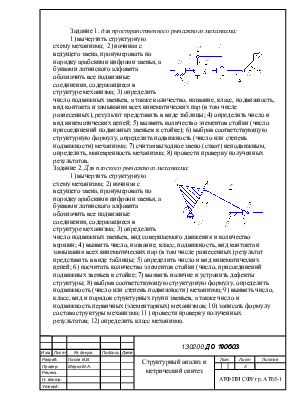
Задание 1. для пространственного рычажного механизма:
 1)
вычертить структурную схему механизма; 2) начиная с ведущего звена,
пронумеровать по порядку арабскими цифрами звенья, а буквами латинского
алфавита обозначить все подвижные соединения, содержащиеся в структуре
механизма; 3) определить число подвижных звеньев, а также количество, название,
класс, подвижность, вид контакта и замыкания всех кинематических пар (в том
числе разнесенных), результат представить в виде таблицы; 4) определить число и
вид кинематических цепей; 5) выявить количество элементов стойки (число
присоединений подвижных звеньев к стойке); 6) выбрав соответствующую
структурную формулу, определить подвижность (число или степень подвижности)
механизма; 7) считая выходное звено (схват) неподвижным, определить, маневренность
механизма; 8) провести проверку полученных результатов,
1)
вычертить структурную схему механизма; 2) начиная с ведущего звена,
пронумеровать по порядку арабскими цифрами звенья, а буквами латинского
алфавита обозначить все подвижные соединения, содержащиеся в структуре
механизма; 3) определить число подвижных звеньев, а также количество, название,
класс, подвижность, вид контакта и замыкания всех кинематических пар (в том
числе разнесенных), результат представить в виде таблицы; 4) определить число и
вид кинематических цепей; 5) выявить количество элементов стойки (число
присоединений подвижных звеньев к стойке); 6) выбрав соответствующую
структурную формулу, определить подвижность (число или степень подвижности)
механизма; 7) считая выходное звено (схват) неподвижным, определить, маневренность
механизма; 8) провести проверку полученных результатов,
 Задание
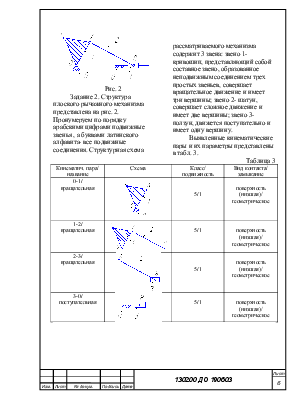
2. Для плоского рычажного механизма:
Задание
2. Для плоского рычажного механизма:
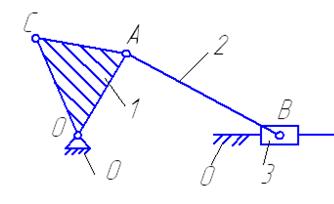
1) вычертить структурную схему механизма; 2) начиная с ведущего звена, пронумеровать по порядку арабскими цифрами звенья, а буквами латинского алфавита обозначить все подвижные соединения, содержащиеся в структуре механизма; 3) определить число подвижных звеньев, вид совершаемого движения и количество вершин; 4) выявить число, название, класс, подвижность, вид контакта и замыкания всех кинематических пар (в том числе разнесенных) результат представить в виде таблицы; 5) определить число и вид кинематических цепей; 6) посчитать количество элементов стойки (число, присоединений подвижных звеньев к стойке; 7) выявить наличие и устранить дефекты структуры; 8) выбрав соответствующую структурную формулу, определить подвижность (число или степень подвижности) механизма; 9) выявить число, класс, вид и порядок структурных групп звеньев, а также число и подвижность первичных (элементарных) механизмов; 10) записать формулу состава структуры механизма; 11) провести проверку полученных результатов; 12) определить класс механизма.
 |
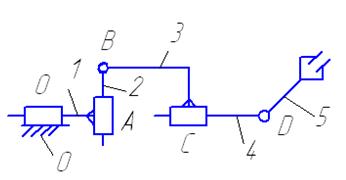
Задание 3. Для плоского рычажного механизма:
1) выбрать масштабный коэффициент длин; 2) перевести все заданные геометрические параметры механизма, имеющие размерность длин (м) в масштабный коэффициент; 3) построить кинематическую схему механизма.
Все данные представлены в табл. 1.
Таблица 1
|
iОА , м |
iАВ , м |
iОС , м |
iАС , м |
j, ° |
|
0,8 |
1,4 |
0,5 |
0,6 |
250 |
 |
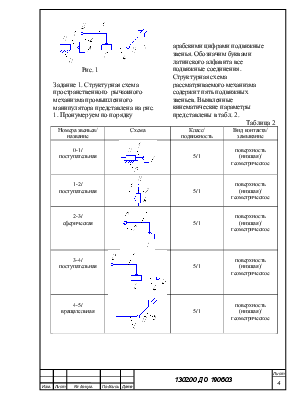
Рис. 1
Задание 1. Структурная схема пространственного рычажного механизма промышленного
манипулятора представлена на рис. 1. Пронумеруем по порядку арабскими цифрами подвижные
звенья. Обозначим буквами латинского алфавита все подвижные соединения. Структурная
схема рассматриваемого механизма содержит пять
подвижных звеньев. Выявленные кинематические параметры
представлены в табл. 2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.