Лабораторная работа №3
Создание модели объекта управления
Цель работы:
1. Изучить принципы построения математических моделей технических объектов.
2. Выполнить построение математической модели объекта управления в среде Simulink пакета MatLab.
3. Экспериментально проверить работоспособность полученной модели.
Знания, полученные при выполнении лабораторной работы:
· освоение математического аппарата и создания на его основе математической модели объекта управления;
· моделирование работы объекта управления в среде Simulink пакета инженерного проектирования MatLab;
· освоение принципов верификации математической модели объекта управления.
Ключевые слова:
линейные дифференциальные уравнения с постоянными коэффициентами, объект управления, объект регулирования, имитационное моделирование, ПИ-регулятор, запорно-регулирующая арматура, интегрирующее звено, сумматор, функция Хэвиссайда, возмущающее воздействие, настройки регулятора.
Содержание лабораторной работы
1. Общее описание
Большинство объектов управления (регулирования) могут быть описаны линейными дифференциальными уравнениями с постоянными коэффициентами. Основываясь на описании объекта регулирования, заданного дифференциальным уравнением второго порядка, рассмотрим этапы построения модели объекта регулирования. Модель процесса регулирования в лабораторной работе выполняется в виде ПИ-регулятора, который совместно с моделью запорно-регулирующей арматуры является замкнутой системой автоматического регулирования.
2. Методические указания
В лабораторной работе рассматривается объект, у которого входным воздействием является параметр - un, а выходная величина x (рис.3.1).

Рис. 3.1 Описание объекта
Известно, что в результате экспериментов по исследованию динамики объекта получено следующее дифференциальное уравнение, описывающее изменение x(t) в зависимости от изменения возмущающей функции un(t):
a2*x”(t)+ a1*x’(t) + a0*x(t)= b0*u(t), (3.1)
где
x(t) – выходной параметр объекта;
u (t) – входной параметр объекта;
a2, a1, a0, b0– коэффициенты дифференциального уравнения.
Возмущающая функция un(t) является известной функцией времени. Также заданы начальные условия, т.е. в начальный момент времени для объекта известны x|t=0и x’|t=0.
В лабораторной работе необходимо решить дифференциальное уравнение – значит получить функцию x(t), меняющуюся во времени. Для составления структурной схемы решения применим метод понижения порядка производной, который сводится к следующим этапам.
Этап I.Разрешим дифференциальное уравнение относительно высшей производной
|
x”(t) = (b0/a2)_*u(t) – (a1/a2)*x’(t) – (a0/a2)*x(t). |
(3.2) |
Этап II: Предположим (рис. 3.2), что в точке А значение x”(t) известно в любой момент времени, с помощью интегрирующего звена и с учетом начальных условий получим в точке В значение x’(t). Затем, с помощью еще одного интегратора , в точке С получим значение искомой функции x(t).
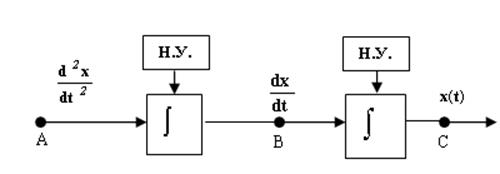
Рис. 3.2 Интегрирующие звенья
Этап III.Обратим теперь внимание на правую часть уравнения (3.2). Она представляет собой сумму трех функций времени u(t), x’(t) и x(t), взятых с постоянными коэффициентами. Функция u(t) - известная функция времени по условию лабораторной работы.
Допустим, рис. 3.3, что нам известны функции x(t) в точке С1 и x’(t) в точке В1. Теперь, просуммировав их с коэффициентами, соответствующими правой части, получим вторую производную x”(t). Таким образом, на выходе сумматора, в точке A1, будет величина x”(t), известная в любой момент времени.
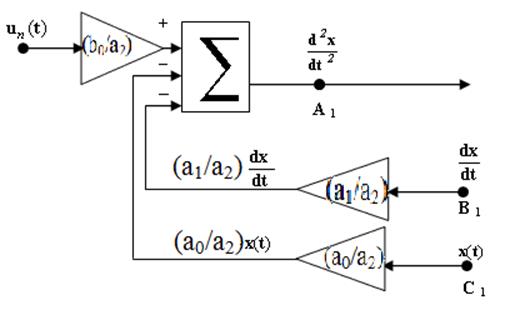
Рис. 3.3 Разомкнутая схема
Этап IV. Равенство (3.2), которое происходит из физической
сущности моделируемого объекта, требует, чтобы оно (это равенство) выполнялось
в каждый момент времени t . Для реализации этого требования, - достаточно
замкнуть схемы, показанные на рис. 3.2 и 3.3. При этом сольются: точки А
и А1 , В и В1 , С
и С1 (рис. 3.4).
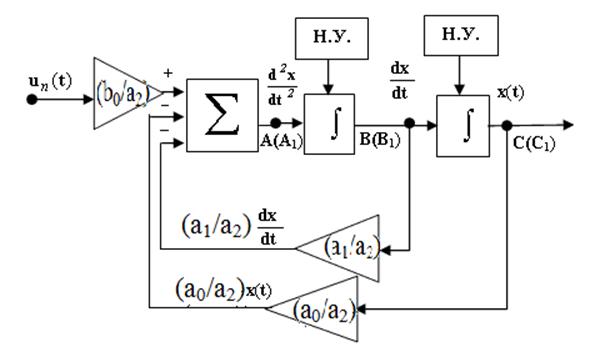
Рис. 3.4 Замкнутая схема
Моделирование встроенной функции управления привода для запорно-регулирующей арматуры выполняется на основе уравнения ПИ-регулятора, которое записывается следующим образом:
|
|
(3.3) |
где
yрег - выходная величина регулятора;
Δx = ( x - x3 ) - входная величина регулятора, - рассогласование, - разница между текущим значением регулируемой величины x и заданием x3;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.