S1, S0 - настройки регулятора соответственно пропорциональная и интегральная части.
3. Порядок выполнения экспериментальной части работы
3.1. Описание объекта управления и условия функционирования
В данной лабораторной работе выполняется построение модели работы запорно-регулирующей арматуры R 209 (производство фирмы Belimo) совместно с работой привода (NR24-SR) со встроенной функцией ПИ-регулятора.
Описание объекта:
Работа запорно-регулирующей арматуры R 209 (шарового крана) описывается линейным дифференциальным уравнением с постоянными коэффициентами: a2*x”(t)+ a1*x’(t)+ a0*x(t)= b0*u(t),
где
x(t) – выходной параметр объекта – угол поворота (открытия) шарового крана, град;
u (t) – входной параметр объекта – скорость вращения привода, об/мин (моделируется с помощью функция Хэвиссайда, т.е. скачкообразное возмущение);
a2, a1, a0, b0– коэффициенты дифференциального уравнения - a2=14, [с2/ град]; a1=4.15, [с / град]; a0=2.21, [с / град]; b0=0.119, [1/ об/мин].
Арматура обладает следующими конструктивными особенностями:
- диапазон углов поворота (влияющий на расход среды) – от 0 (полный расход) до 90 (нулевой расход) град;
- диапазон углов поворота (c учетом механических ограничителей крана) – от -20 до 110 град.
Начальными условием является положение шарового крана на уровне - 20 град.
3.2. Реализация модели в среде Simulink пакета инженерного проектирования MatLab
В пакете MatLab имеется специальная среда для исследования и моделирования систем контроля и управления – пакет Simulink. Создадим в данной среде модель, описывающую работу запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR) – ПИ-регулятором, при задании максимального времени работы модели - 150 с(внешний вид модели, приведен на рис. 3.5).
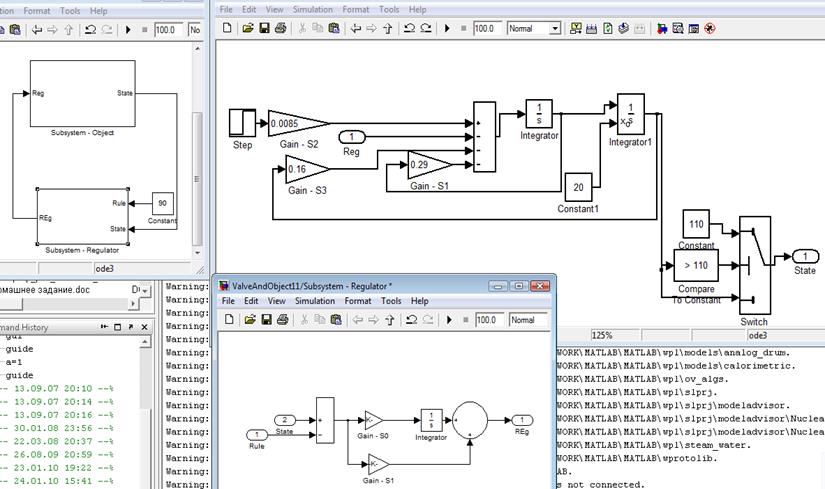
Рис. 3.5 Модель работы запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR)– ПИ-регулятором
В ходе моделирования рассматривается только процесс закрытия арматуры путем формирования задания для ПИ-регулятора – 90 градусов. Определим стандартный вид возмущающего воздействия u(t), чтобы была возможность сравнивать переходные процессы. Это скачкообразное возмущение (функция Хэвиссайда) u(t)=const является наиболее неблагоприятным, и вследствие, этого, принято стандартным для изучения систем регулирования, рис. 3.6. Оно реализуется элементом Step раздела Source.
Рис. 3.6 Скачкообразное возмущение
3.3. Выполнение самостоятельного построения модели и анализа результатов моделирования
Выполнить исследование работы модели запорно-регулирующей арматуры R 209 совместно с приводом (NR24-SR) – ПИ-регулятором и оценить полученные результаты в следующей последовательности:
1.Построить модель объекта с учетом того, что коэффициенты дифференциального уравнения - a2=8, [с2/ град]; a1=2.18, [с / град]; a0=1.03, [с / град]; b0=0.0591, [1/ об/мин].
2. Найти настройки регулятора (обеспечивающие процесс регулирования) в случае если диапазон их допустимых значений от 0 до 2.
3. Выполнить моделирование полного открытия (задание для регулятора – 0 град.) с учетом возможного диапазона углов из-за механических ограничителей крана.
4.Снять временные характеристики с входов и выходов модели с помощью элементов Scope библиотеки Simulink.
5.Объяснить работу модели при различных настройках регулятора.
Отчет по лабораторной работе должен содержать:
– цель и краткое теоретическое описание лабораторной работы;
– входные данные модели, которые использовались при моделировании в табличной и/или графической форме;
– экспериментально полученные результаты моделирования в графическом виде и внешний вид полученной модели в среде Simulink;
– выводы о работе модели при различных настройках регулятора.
Вопросы для самоконтроля:
1. Описать формульную зависимость для линейного дифференциального уравнения с постоянными коэффициентами?
2. Перечислить и описать этапы составления структурной схемы решения линейного дифференциального уравнения с постоянными коэффициентами?
3. Описать формульную зависимость для ПИ-регулятора?
4. Привести график реализации функции Хэвиссайда?
5. Что такое интегрирующее звено?
6. Что такое сумматор?
1. Герман-Галкин С.З.. MatLab & Simulink Проектирование мехатронных систем на ПК. М.: Корона-Век, 2008. 368 с.
2. А.С. Кулик Основы моделирования систем: учеб. пособие / А.С. Кулик. -Х. Харьк. авиац. ин-т, 1998. -95с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.