2.2.2.7) Строим касательные окружности, такие , чтобы их центр был на отрицательной реальной оси и они касались, как луча ОЕ, так и построенных кривых
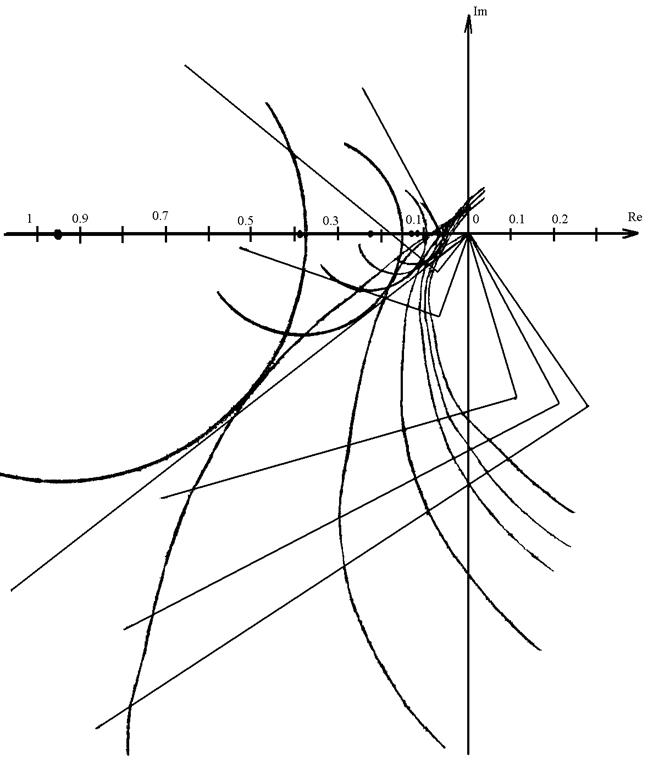
Рисунок 20 – амплитудно-фазо-частотная характеристика
Получили последовательность радиусов:
r1=0.95, r2=0.38, r3=0.22, r4=0.16, r5=0.13, r6=0.12
2.2.2.8) Находим пропорциональные настройки:
k11=![]() =1.05, k12=2.63, k13=4.5,
k14=6.25, k15=7.7, k16=8.3
=1.05, k12=2.63, k13=4.5,
k14=6.25, k15=7.7, k16=8.3
2.2.2.9) Строим плоскость границы устойчивости в координатах рассчитанных k1 и выбранных Ти
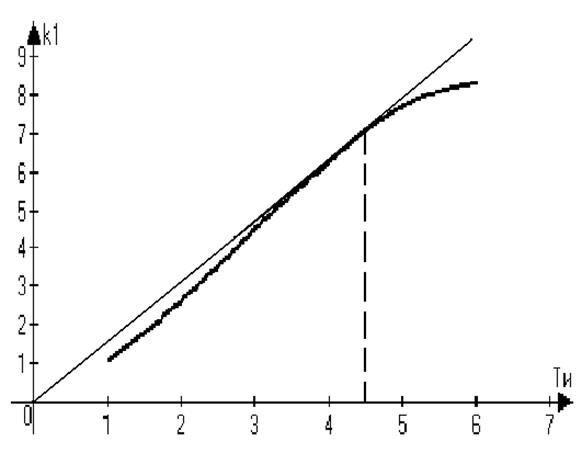
Рисунок 21-плоскость границы устойчивости
Построили касательную к плоскости устойчивости из начала координат, и точка касания будет определять оптимальные коэффициенты k1o и Тио
k1o=7, Тио=4,5
2.2.2.10) Находим числовые значения интегральной настройки регулятора
k2o=![]() =
=![]() =0.22
=0.22
R(p)=7+![]()
2.3.3 Метод расчета ПИД-закона регулирования
Метод основан на применении критерия качества заданной степени колебательности.
1) Составили расширенную характеристику объекта. Для этого в передаточной функции объекта
р![]() iω-mω,
Степень колебетельности m=0.75, так как регуляторы носят электрический характер
или обладают электрической физической природой.
iω-mω,
Степень колебетельности m=0.75, так как регуляторы носят электрический характер
или обладают электрической физической природой.
W=[ ]
]
W=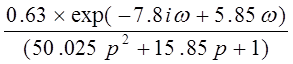 =
=
= =
=
=
A=
F=-7.8ω-arctg(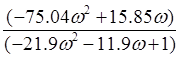 )
)
2) Из АФХ расширенной, используя систему уравнений Найквиста-Михайлова, определили частотные характеристики регулятора по алгоритму:
1.1 Задали любые значения частоты ωi ;
1.2 ωi подставили в АЧХ объекта расширенное и ФЧХ объекта расширенное
![]()
3) Определили параметрическую функцию
I=Aрег sin Fрег
R= Aрег cos Fрег
Таблица 6 – значения АЧХ и ФЧХ при различных ω
|
ω |
0.08 |
0.09 |
0.1 |
0.3 |
0.5 |
0.7 |
|
А |
1.27 |
1.25 |
1.22 |
0.73 |
0.78 |
1.2 |
|
F |
-97 |
-108 |
-117 |
-206 |
-230 |
-240 |
|
Ap |
0.78 |
0.8 |
0.82 |
1.37 |
1.28 |
0.83 |
|
Fp |
97 |
108 |
117 |
206 |
230 |
240 |
|
I |
0.77 |
0.76 |
0.73 |
-0.6 |
-0.5 |
-0.72 |
|
R |
-0.01 |
-0.25 |
-0.37 |
-1.23 |
-1.18 |
-0.42 |
4) Из всех числовых значений I и R строится плоскость параметрической функции
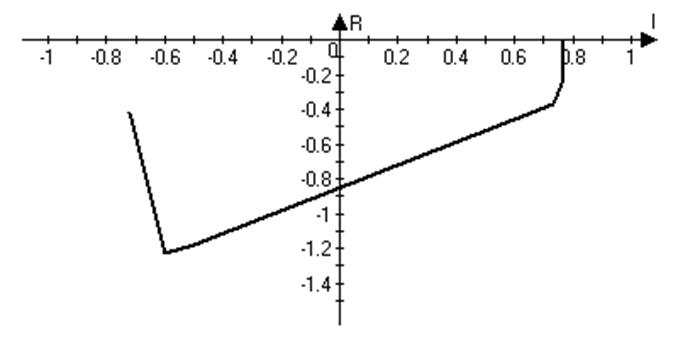
Рисунок 23-плоскость параметрической функции
ωmin=0.3, Im=Io= -0.6, Rm=Ro= -1.23
5) Составили систему уравнений, которая отражает свойства только регулятора
Задаем любые значения числовым коэффициентам k1 и систему уравнений решаем относительно k2, k3. До тех пор пока не выполнится неравенство:
0,25<![]() <0,75
<0,75
k1=30, 
![]() k2=9.9, k3=68.3
k2=9.9, k3=68.3
0.25< <0.75
<0.75![]() найденные числовые значения являются оптимальными.
найденные числовые значения являются оптимальными.
3.1 Расчет системы автоматического регулирования
Для расчета выбрана одноконтурная САР, в которой происходит автоматическое регулирование температуры в головках шприц-машин путем изменения расхода охлаждающей воды. (Необходимо обосновать выбор именно этой системы регулирования) В этом контуре регулирования применяем ПИД регулятор, т.к. он воздействует на объект регулирования прямопропорционально отклонению регулируемой величины интеграла отклонения и скорости отклонения. При скачкообразном изменении входной величины идеальный ПИД – регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект, затем величина воздействия мгновенно падает до значения определяемого пропорциональной частью регулятора, после чего вступает в работу ПИ - регулятор и воздействие на объект постепенно наращивается по интегральному закону.
Параметры регулятора – это пропорциональный коэффициент k1, интегральный – k2 и постоянный дифференциальный k3.
ПИД – регулятор является универсальным т.к. задавая бесконечно большое или бесконечно малые значения коэффициентов можно получить регулирование любого типа.
Для проведения расчета необходимы следующие исходные данные:
– динамические характеристики объекта;
– динамические характеристики регулятора;
– критерий устойчивости Найквиста – Михайлова в виде
 (3.1)
(3.1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.