Задаются любым значением и уравнения решаются относительно двух неизвестных. Пусть k1 = 0,8, то k2 = 0,61; k3 = 0,6.
Полученные числовые значения вставляются в комплекс:
0,25 < k2*k3/k1^2 < 0,75;
0,25 < 0,59 < 0,75.
Полученные числовые значения настроечных коэффициентов для ПИД-регулятора неравенство удовлетворяют, поэтому расчет можно окончить.
2.3 Выводы
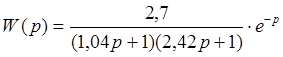
В данной главе по аналитическому методу расчета объекту управления был присвоен второй порядок и была найдена передаточная функция объекта по экспериментально снятой временной характеристике:
Были определены математические описания управляющих устройств:
- для П-регулятора R(p) = 1,6;
- для ПИ-регулятора R(p) = 0,45 + 0,5/p;
- для ПИД-регулятора R(p) = 0,8 + 0,61/p + 0,6p.
2.3.1 Метод расчета П-закона регулирования
Исходные данные:
1) математическая модель объекта
W0(p)= )=[ ]
] ![]() exp(-7,8p)
exp(-7,8p)
2) математическая модель регулятора Хр(t)=k1![]() z(t)
z(t)
3) критерий устойчивости Найквиста-Михайлова W0![]() Wр+1=0
Wр+1=0
По известной W0(p) находим амплитудно-частотную характеристику объекта
и фазо-частотную характеристику объекта. Для этого заменяем p![]() i
i![]()
![]() ,
exp(-p
,
exp(-p![]()
![]() )=cos
)=cos![]() -i
-i![]() sin
sin![]()
W(i![]() )=[
)=[ ]=[
]=[ ]
]
A(![]() )=
)=
F(![]() )=-7,8
)=-7,8![]() -arctg(
-arctg( )
)
|
|
0 |
0,001 |
0,005 |
0,01 |
0,02 |
0,03 |
0,05 |
0,07 |
0,08 |
0,1 |
0,2 |
0,3 |
0,5 |
0,7 |
0,9 |
1,5 |
2 |
|
A |
0,63 |
0,63 |
0,62 |
0,62 |
0,61 |
0,59 |
0,53 |
0,47 |
0,42 |
0,38 |
0,19 |
0,11 |
0,04 |
0,02 |
0,01 |
0,005 |
0,003 |
|
F |
0 |
-1 |
-5 |
-9 |
-18 |
-27 |
-43 |
-56 |
-63 |
-74 |
-109 |
-129 |
-150 |
-160 |
-167 |
-179 |
-186 |
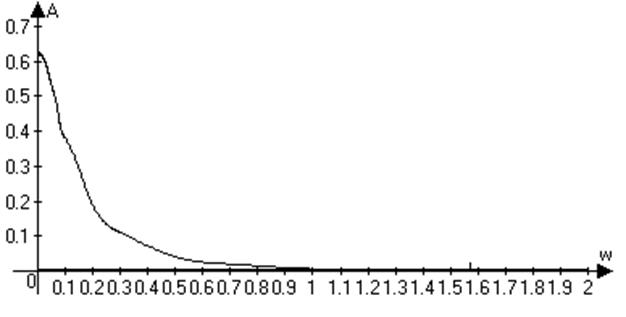
Рисунок 17-амплитудная характеристика
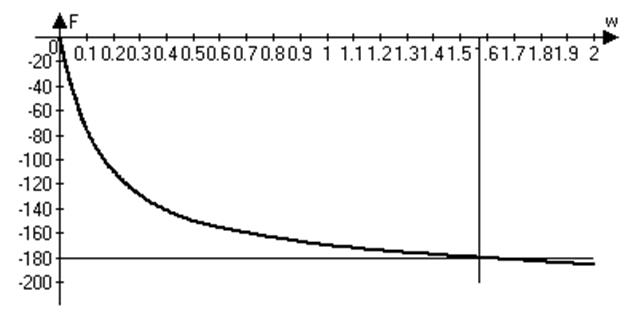
Рисунок 18-частотная характеристика
Критерий Найквиста-Михайлова представляем в алгебраической форме:
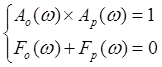
![]() =1,57, Ao(ωp)=0.005
=1,57, Ao(ωp)=0.005
Зная ωр и Ао(ω)Ар(ω)=1, можно определить значение АЧХ регулятора для этой рабочей ω.
Ар(ωр)= =k1; k1=
=k1; k1= =200
=200
R(p)=200
2.3.2 Метод расчета ПИ-закона регулирования
Исходные данные:
1) Математическая модель объекта Wo(p)
2)
Математическая модель регулятора хр=k1z(t)+k2![]()
2.2.2.1)Задаем любые значения частоты и из АЧХ и ФЧХ объекта строим последовательность векторов.
Таблица 4 – значения АЧХ и ФЧХ при различных ω
|
|
0,07 |
0,08 |
0,1 |
0,2 |
0,3 |
0,5 |
|
A |
0,47 |
0,42 |
0,38 |
0,19 |
0,11 |
0,04 |
|
F |
-56 |
-63 |
-74 |
-109 |
-129 |
-150 |
2.2.2.2) Из вершин векторов строим перпендикуляры.
2.2.2.3) На перпендикулярах откладываем отрезки, длины которых вычислили по формуле:
ωiAi=![]()
где Оωi – длина каждого i-ого вектора или АЧХ;
ωi – выбранная частота;
Тиi – время интегрирования, выбирается произвольно.
Таблица 5 – значения отрезков в зависимости от значений Ти и ωi
|
Ти ωi |
ω1 |
ω2 |
ω3 |
ω4 |
ω5 |
ω6 |
|
1 |
6.71 |
5.25 |
3.8 |
0.95 |
0.37 |
0.08 |
|
2 |
3.36 |
2.63 |
1.9 |
0.48 |
0.18 |
0.04 |
|
3 |
2.24 |
1.75 |
1.27 |
0.32 |
0.12 |
0.03 |
|
4 |
1.68 |
1.31 |
0.95 |
0.24 |
0.09 |
0.02 |
|
5 |
1.34 |
1.05 |
0.76 |
0.19 |
0.07 |
0.016 |
|
6 |
1.12 |
0.88 |
0.63 |
0.16 |
0.06 |
0.013 |
2.2.2.4) На каждый перпендикуляр откладываем значения отрезков ωА, с соответствующей ω
2.2.2.5) Точки соответствующие одинаковому значению времени интегрирования, но разным частотам, соединяем плавными кривыми
2.2.2.6) Из начала координат, под углом 380 к отрицательной реальной оси, проводим луч ОЕ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.