Построение выполняется с помощью программы "Кинематический расчет", разработанной на кафедре проектирования технологических машин.
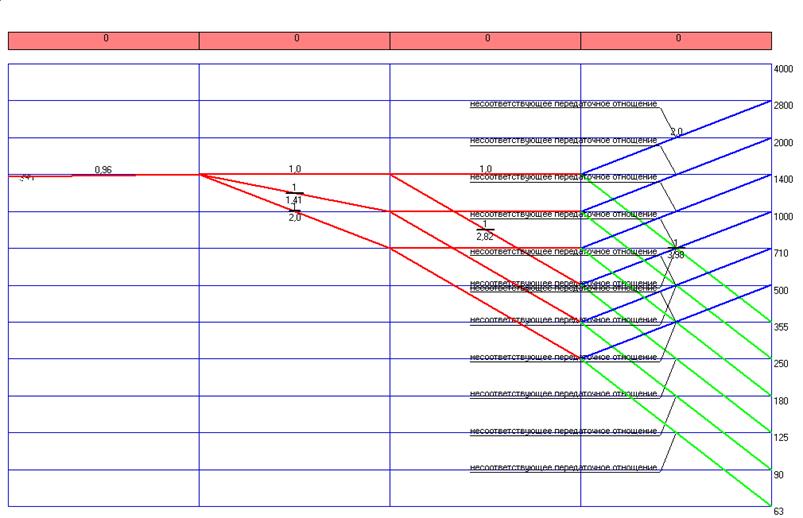
Рисунок 5.1 Картина частот вращения привода с двигателем АИР90L4
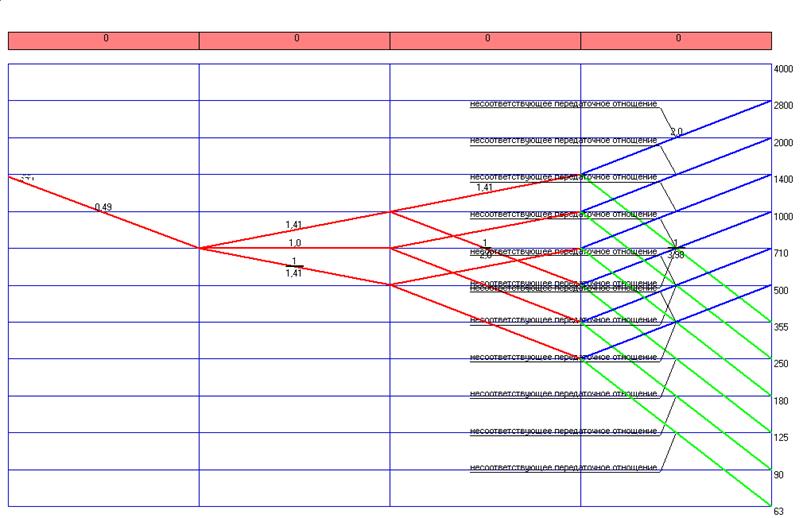
Рисунок 5.2 Картина частот вращения привода с двигателем АИР90L4
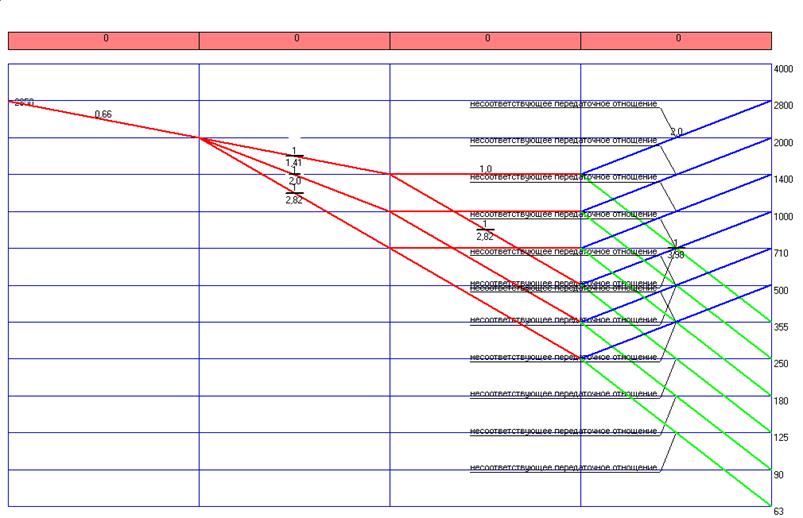
Рисунок 5.3 Картина частот вращения привода с двигателем АИР80В2
Проанализировав картины частот вращения принимаем вариант представленный на рис. 5.2. Такой вариант обладает оптимальным соотношением редукции к мультипликации, улучшает условия зацепления зубьев шестерен, обеспечивая довольно низкий уровень шума и вибрации. Определим передаточные отношения и обозначим передачи (рисунок 5.4).
Рисунок 5.4 Картина частот вращения привода
Определив передаточные отношения, найдем числа зубьев шестерен и колес. Их подберем по специальным таблицам [4]. Результаты выбора сведем в таблицу 5.1.
Таблица 5.1 - Число зубьев передач.
|
Передачи |
i расчетное |
Z шестерни |
Z колеса |
|
Р.п. |
0,49 |
||
|
1.1 1.2 1.3 |
1,41 1 1/1,41 |
42 36 30 |
30 36 42 |
|
2.1 2.2 |
1,41 1/2 |
49 28 |
35 56 |
|
3.1 3.2 |
2 1/3,98 |
72 22 |
36 86 |
|
4.1 4.2 |
1 1 |
54 54 |
54 54 |
Определим диаметр шкивов ремённой передачи:
Ведущий шкив возьмём стандартный диаметром 80 мм, а диаметр ведомого шкива найдём из уравнения:
Примем диаметр шкива 164 мм.
Определим фактические частоты вращения шпинделя
Определим погрешности частот вращения шпинделя и сравним их с допустимым значением, которое вычислим по формуле
где
![]()
![]()
Результаты вычислений сведем в таблицу 5.2.
Таблица 5.2 - Погрешности частот вращения шпинделя
|
Частота стандартная |
Частота фактическая |
Погрешность δni, % |
|
2800 63 |
2667,512 62,171 |
3,9 1,3 |
Получившиеся погрешности не превышают предельного значения.
Завершая кинематический расчет, построим окончательный вариант картины частот вращения и разработанную кинематическую схему привода главного движения.
 Рисунок 5.5 Картина частот
вращения привода
Рисунок 5.5 Картина частот
вращения привода
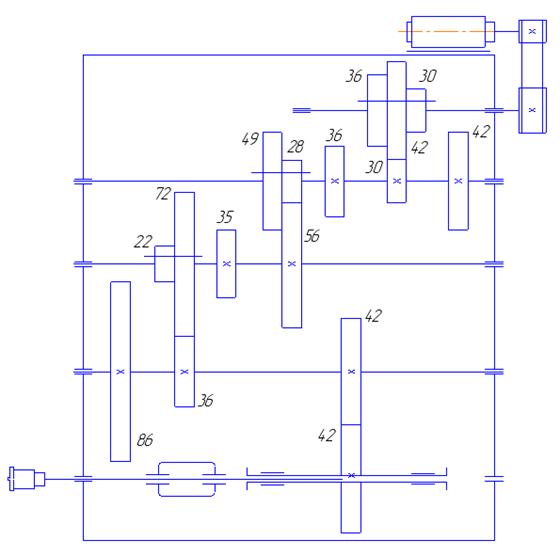
Рисунок 5.6 Кинематическая схема привода
Заключение
В данной работе произведена разработка общей концепции специализированного станка с ручным управлением для обработки деталей типа «Гайка».
Были проанализированы обрабатываемые поверхности детали с точки зрения различных видов обработки, подобран режущий инструмент и приспособления для его крепления. Осуществлены анализ и обоснование структурно-кинематических схем и компоновки станка.
На основе рассчитанных режимов резания для обработки заданных поверхностей проведен расчет и анализ эксплуатационных и технических характеристик.
По полученным эксплутационным и техническим характеристикам проведен кинематический расчет, построена картина частот вращения, разработана кинематическая схема привода главного движения.
Отличительной особенностью разработанной концепции станка является простота конструкции привода перемещений стола, а следовательно низкая себестоимость станка.
Список использованных источников
1 Баранчиков В.И. Прогрессивные режимы резания и режущий инструмент. / справочник. М.: Машиностроение, 1990.
2 Справочник конструктора-машиностроителя. В 3-х т. В.И. Анурьев – М.: Машиностроение, 2003.
3 Справочник технолога-машиностроителя – под редакцией А.Г. Касиловой – М.: Машиностроение, 1995.
4 Чесов Ю.С., Птицын С.В. Проектирование металлорежущего оборудования: учебное пособие. – Новосибирск: издательство НГТУ, 2000.
5 Чесов Ю.С., Птицын С.В. Автоматизированный привод металлообрабатывающего оборудования: справочно-методическое пособие. – Новосибирск: издательство НГТУ, 2003.
6 Казанцев М.Е. Построение структурных схем и настройка параметров исполнительных движений: Учеб. Пособие.- Новосибирск: Изд-во НГТУ, 1997.
7 Пуш В.Э. Металлорежущие станки. – М.: Машиностроение, 1977.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.