Петербургский Государственный Университет
Путей Сообщения
Кафедра «Автоматика и телемеханика на железнодорожном транспорте»
«Изучение стрелочного электропривода»
Выполнил студент группы АТК-404
Рогожин И.Н.
Проверила
Кузнецов В.
2007
Цель работы: изучение устройства и работы стрелочного электропривода.
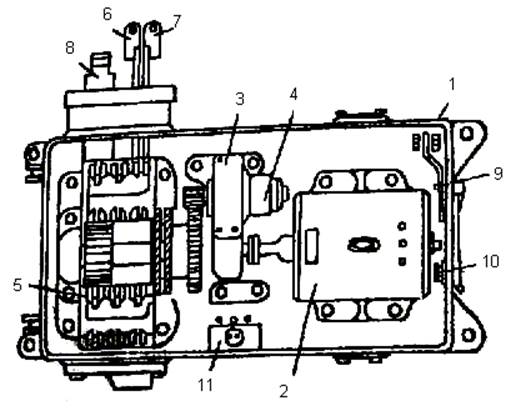
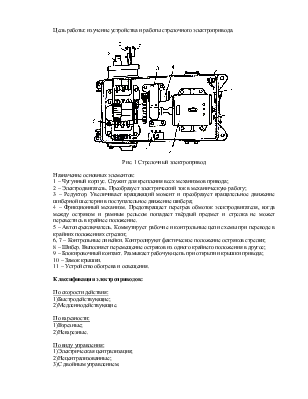
Рис. 1 Стрелочный электропривод
Назначение основных элементов:
1 – Чугунный корпус. Служит для крепления всех механизмов привода;
2 – Электродвигатель. Преобразует электрический ток в механическую работу;
3 – Редуктор. Увеличивает вращающий момент и преобразует вращательное движение шиберной шестерни в поступательное движение шибера;
4 – Фрикционный механизм. Предотвращает перегрев обмоток электродвигателя, когда между остряком и рамным рельсом попадает твёрдый предмет и стрелка не может перевестись в крайнее положение.
5 – Автопереключатель. Коммутирует рабочие и контрольные цепи схемы при переводе в крайних положениях стрелки;
6, 7 – Контрольные линейки. Контролируют фактическое положение остряков стрелки;
8 – Шибер. Выполняет перемещение остряков из одного крайнего положения в другое;
9 – Блокировочный контакт. Размыкает рабочую цепь при открытии крышки привода;
10 – Замок крышки.
11 – Устройство обогрева и освещения.
Классификация электроприводов:
По скорости действия:
1)Быстродействующие;
2)Медленнодействующие.
По взрезности:
1)Взрезные;
2)Невзрезные.
По виду управления:
1)Электрическая централизация;
2)Нецентрализованные;
3)С двойным управлением.
По спаренности:
1)Одиночные;
2)Спаренные.
По наличию автовозврата.
1)С автовозвратом;
2)Без автовозврата.
По наличию электрообогрева.
1)С электрообогревом;
2)Без электрообогрева.
Основные механические характеристики:
Таблица 1
|
Характеристика |
Значение для привода СП-6 |
|
Максимальное тяговое усилие: |
6000Н |
|
Максимальное время перевода: |
7с |
|
Назначенный ресурс: |
1.2*10-6 срабатываний при усилии 3500Н |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.