![]()
![]() Приемник1
устройство
Приемник1
устройство
![]()
![]()
![]()
![]()
![]()
![]()
![]() u∑
u∑
 |
uΔ Uстр
![]() Приемник 2
б)
Приемник 2
б)
Пеленгационное устройство
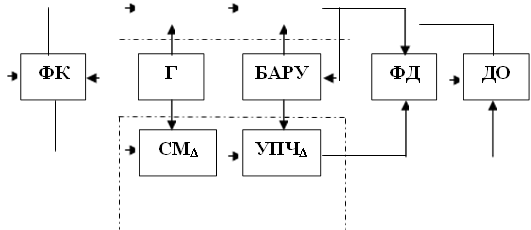
Рисунок 5.5 - Моноимпульсная амплитудная суммарно-разностная РЛС:
а) антенная система; б) функциональная схема системы АСН
Антенная система, рассматриваемой системы АСН, подобна антенне
обычной моноимпульсной системы. С помощью фазирующего кольца ФК на несущей частоте образуются сигнал рассогласования, пропорциональный
угловому отклонению цели от линии равных сигналов uΔ , и опорное
суммарное напряжение u∑ . Сигналы uΔ и u∑ , после преобразования
поступают на входы фазового детектора ФД. При этом на выходе ФД
появляется постоянное напряжение (сигнал ошибки), которое после усиления и преобразования подается на исполнительный двигатель.
Каналы азимута и угла места отличаются только тем, что входные
сигналы пеленгационного устройства снимаются с вибраторов антенны, расположенных в разных плоскостях. В фазирующем кольце разностный сигнал в каждой из плоскостей сдвигается по фазе на угол π /2.
В современных системах антенные системы выполняются с применением фазированных антенных решеток. Фазированная антенная решетка (ФАР) - антенная решетка с управляемыми фазами или разностями фаз (фазовыми сдвигами) волн, излучаемых (или принятых) ее элементами (излучателями). Управление фазами (фазирование) позволяет: формировать (при весьма разнообразных расположениях излучателей) необходимую диаграмму направленности (ДН) ФАР (например, остронаправленную ДН – луч); изменять направление луча неподвижной ФАР и таким образом осуществлять быстрое, в ряде случаев практически безынерционное, сканирование – качание луча. В зависимости от требуемой формы ДН и необходимого пространственного сектора сканирования в ФАР применяют различное взаимное расположение элементов: вдоль линии (прямой или дуги); по поверхности (например, плоской – в так называемых плоских ФАР, цилиндрической, сферической) или в заданном объеме (объемные ФАР). Иногда форма излучающей поверхности ФАР – раскрыва , определяется конфигурацией объекта, на котором устанавливается ФАР (например, формой ИСЗ, формой корпуса ракеты).
Важную роль играет, стоящее в ПРМ системы, устройство БАРУ (быстрой автоматической регулировки усиления), работающее по сигналу суммарного канала. Благодаря БАРУ крутизна пеленгационной характеристики остается неизменной. При большом соотношении сигнал/шум влияние шумов на работу БАРУ можно не учитывать. Напряжение регулирования, поступающее с БАРУ,
![]() ,
(5.11)
,
(5.11)
где kр- коэффициент передачи цепи БАРУ. Тогда напряжение на выходе
УПЧ разностного канала
![]() , (5.12)
, (5.12)
где ka - постоянный
коэффициент, измеряемый в вольтах, ![]() .
.
Для простоты рассуждений пренебрежем собственными шумами в
суммарном канале. Тогда напряжение на выходе УПЧ суммарного канала
запишется в виде
![]() . (5.13)
. (5.13)
Для малых значений угла рассогласования γ можно считать, что
амплитуда сигнала разностного канала значительно меньше суммарного. В этом случае напряжение на выходе ФД
![]() ,
(5.14)
,
(5.14)
где
![]() .
(5.15)
.
(5.15)
В (5.15) дисперсия шума σш2 определяется выражением (5.2). После
подстановки (5.11) в (5.15) получим
![]() , (5.16)
, (5.16)
где, как и прежде, ![]() .
.
С выхода ФД напряжение подается на детектор огибающей, который
практически не изменяет энергетических соотношений входных сигналов.
Окончательно крутизна пеленгационной характеристики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.