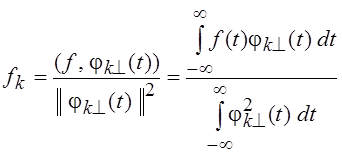
Преимущество ортогональных
базисов состоит в том, что для отыскания координат вектора в ортогональном
базисе нет необходимости решать линейную систему уравнений. Для ортогонального
базиса ![]() координаты вектора, принадлежащего L2
(для функции f(t)
коэффициенты Фурье), равны:
координаты вектора, принадлежащего L2
(для функции f(t)
коэффициенты Фурье), равны:
 .
.
В этой связи актуальной является задача построения на основе линейно независимой системы векторов эквивалентной ей ортогональной системы. Такую возможность дает процедура Грама–Шмидта.
Пусть ![]() – система линейно независимых векторов и
нам надо построить ортогональную систему, каждый вектор которой был бы линейной
комбинацией векторов системы
– система линейно независимых векторов и
нам надо построить ортогональную систему, каждый вектор которой был бы линейной
комбинацией векторов системы ![]() .
.
Выберем в качестве первого
вектора новой системы первый вектор исходной, т. е. ![]() 1^ =
1^ = ![]() 1. Второй вектор ортогональной системы построим
как
1. Второй вектор ортогональной системы построим
как ![]() 2^ = l21
2^ = l21![]() 1^ +
1^ + ![]() 2, где коэффициент l21 выбирается из условия ортогональности
2, где коэффициент l21 выбирается из условия ортогональности ![]() 1^ и
1^ и ![]() 2^, т.
е. (
2^, т.
е. (![]() 1^,
1^, ![]() 2^) =
0 = l21(
2^) =
0 = l21(![]() 1^,
1^, ![]() 1^) + (
1^) + (![]() 2,
2, ![]() 1^), откуда
1^), откуда 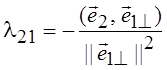 .
Третий вектор
.
Третий вектор ![]() 3^ строится как сумма линейной комбинации
3^ строится как сумма линейной комбинации ![]() 1^ и
1^ и ![]() 2^ и
третьего вектора исходной системы:
2^ и
третьего вектора исходной системы:
![]() 3^ = l32
3^ = l32![]() 2^ + l31
2^ + l31![]() 1^ +
1^ + ![]() 3.
3.
 Учитывая
ортогональность
Учитывая
ортогональность ![]() 1^ и
1^ и ![]() 2^, а
также условие ортогональности
2^, а
также условие ортогональности ![]() 3^
двум построенным векторам
3^
двум построенным векторам ![]() 1^ и
1^ и ![]() 2^, получим:
2^, получим:
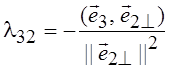 ;
;  .
.
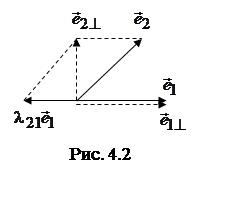
Таким
образом, в основе процедуры лежит следующая схема:  , где
, где  . Иллюстрация этой процедуры для R2
(плоскости) приведена на рис. 4.2.
. Иллюстрация этой процедуры для R2
(плоскости) приведена на рис. 4.2.
Поясним описанную процедуру с помощью нескольких примеров.
1.
Система функций вида ![]() , t ³ 0, где k = 1, 2, … – номер функции, с > 0 – масштабный
множитель, является линейно независимой,
, t ³ 0, где k = 1, 2, … – номер функции, с > 0 – масштабный
множитель, является линейно независимой,
так как заменой ![]() сводится к линейно независимой
системе
сводится к линейно независимой
системе ![]() ,
,
k = 1, 2, …, с которой мы уже встречались.
Ортогональная система на
промежутке [0, ¥) в
соответствии с процедурой Грама–Шмидта строится следующим образом. Первая
функция ![]() ; вторая
; вторая ![]() , где
, где 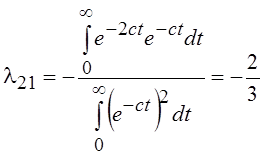 , таким образом
, таким образом  .
Такая система используется для аппроксимации корреляционных функций
стационарных случайных процессов, о которых пойдет речь в гл.7.
.
Такая система используется для аппроксимации корреляционных функций
стационарных случайных процессов, о которых пойдет речь в гл.7.
2. Полиномы Лежандра.
Полиномы Лежандра Pk(t)
получаются на основе ортогонализации на промежутке [–1, 1] системы линейно
независимых функций ![]() . Каждая функция ортогональной
системы, строящейся на основе
. Каждая функция ортогональной
системы, строящейся на основе ![]() , будет линейной
комбинацией степеней t, т. е. Pk(t) =
, будет линейной
комбинацией степеней t, т. е. Pk(t) =  , что представляет собой полином. В
соответствии с процедурой Грама–Шмидта P0(t)
= t0 = 1;
, что представляет собой полином. В
соответствии с процедурой Грама–Шмидта P0(t)
= t0 = 1;
P1(t)
= l10 P0(t)
+ t, где 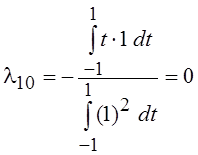 , т.
е. P1(t) = t;
, т.
е. P1(t) = t;
P2(t) = l21 P1(t) + l20 P0(t) + t2,
где 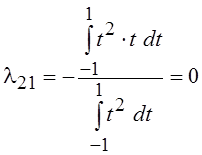 ,
, 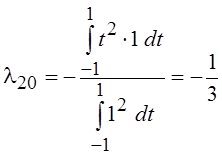 , т. е. P2(t)
= t2 –
, т. е. P2(t)
= t2 – ![]() ;
;
P3(t)
= l32 P2(t)
+ l31 P1(t)
+ l30 P0(t)
+ t3, где 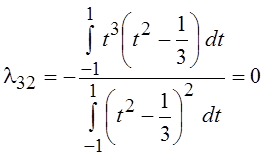 ,
,
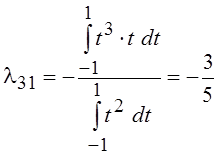 ,
, 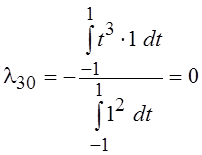 , т. е. P3(t)
= t3 –
, т. е. P3(t)
= t3 – ![]() t.
t.
Построенная система полиномов Лежандра нормирована таким образом, чтобы коэффициент при старшей степени равнялся бы единице. Используют и другие способы нормировки (см. гл.6).
В L2 [a, b] можно ввести метрику, учитывающую, в каких точках промежутка [a, b] возникает отклонение функций друг от друга, т. е.
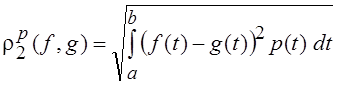 ,
,
где p(t) – весовая функция.
Весовая функция должна быть неотрицательной, и для " f(t)
Î ![]() интегралы
интегралы
 должны сходиться.
должны сходиться.
Система функций ![]() называется ортогональной на промежутке [a, b] с весом p(t), если
называется ортогональной на промежутке [a, b] с весом p(t), если
 ,
,
где ![]() – квадрат нормы по весу p(t).
– квадрат нормы по весу p(t).
Система функций ![]() , ортогональная с весом p(t), может быть
превращена в просто ортогональную, если рассматривать функции
, ортогональная с весом p(t), может быть
превращена в просто ортогональную, если рассматривать функции ![]() .
.
Ортогонализация системы
линейно независимых функций ![]() , k
= 0, 1, … на различных промежутках с различными весовыми функциями позволяет
построить системы ортогональных полиномов
, k
= 0, 1, … на различных промежутках с различными весовыми функциями позволяет
построить системы ортогональных полиномов ![]() , из которых
особую роль играют так называемые классические ортогональные полиномы.
, из которых
особую роль играют так называемые классические ортогональные полиномы.
Классическими называют
ортогональные полиномы, у которых весовая функция p(t) удовлетворяет дифференциальному уравнению  , где t(t) и s(t) – полиномы степени не выше первой и второй
соответственно. Их конкретный вид определяется интервалом ортогональности,
который может быть конечным, полубесконечным, или соответствовать всей числовой
оси (–¥, ¥).
В табл.4.1 приведены основные характеристики классических ортогональных
полиномов.
, где t(t) и s(t) – полиномы степени не выше первой и второй
соответственно. Их конкретный вид определяется интервалом ортогональности,
который может быть конечным, полубесконечным, или соответствовать всей числовой
оси (–¥, ¥).
В табл.4.1 приведены основные характеристики классических ортогональных
полиномов.
Табл.4.1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.