























Министерство образования
Российской Федерации.
Новосибирский государственный технический университет.

Расчетно-графическое задание №2
по дисциплине “Электромеханические системы”.
Электропривод грузоподъемной тележки.
Вариант III-4
Факультет: ЭМФ
Группа: ЭМ-13
Выполнил: Тебеньков В.Н.
Преподаватель: Абакумов И.Д.
Новосибирск 2005 г.
Содержание.
1) Задание на РГР.
Студент: Тебеньков В.Н. группы ЭМ-13
Тема: Электропривод грузоподъемной тележки.
2) Срок предоставления РГР к защите.
Грузоподъемная тележка. Разработка электромеханической системы обоснована учебным планом 2005 учебного года. Начало разработки :10.02.05 г.; окончание разработки 01.04.05 г:.
3) Исходные данные.
4) Содержание пояснительной записки.
4.1 Введение (общее к работе).
4.2 Краткое описание конструкции кинематическая схема механизма. Описание режимов работы. Формулировка требований к электроприводу.
4.3 Составление технического задания на РГР.
4.4 Выбор мощности электродвигателя.
4.4.1 Предварительная номинальная мощность электродвигателя.
4.4.2 Выбор номинальной скорости и редуктора.
4.4.3 Проверка двигателя по нагреву и на перегрузочную способность.
4.5 Выбор мощности генератора и гонного асинхронного двигателя.
4.6 Расчет и построение механических характеристик электропривода.
4.7 Динамический расчет электропривода.
4.7.1 Математическое описание нелинейной системы Г-Д с принимаемыми допущениями.
4.7.2 Составление структуры модели для математической модели динамических режимов.
4.7.3 Расчет параметров и коэффициентов математической модели.
4.7.4 Анализ переходных процессов. Вывод.
4.8 Расчет потерь в электроприводе с учетом переходных процессов.
4.8.1 Определение средней взвешенной КПД за цикл работы.
4.8.2 Проверка мощности электродвигателя методом средних потерь.
4.9 Разработка принципиальной электрической схемы управление электропривода. Выбор элементов схемы, составление спецификации.
4.10 Заключение и выводы по работе.
4.11 Список литературы.
Руководитель РГР: Абакумов И.Д.
Выполнил РГР: Тебеньков В.Н.
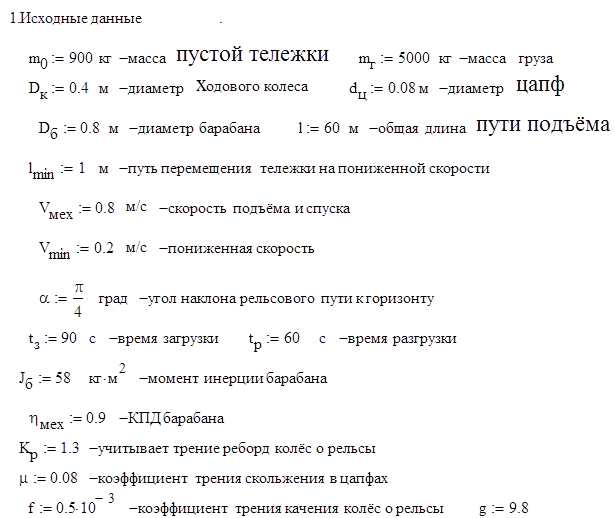
3.Исходные данные
4.Содержание пояснительной записки.
4.1 Введение (общее к работе).
В нашем задании предусматривается разработка электропривода по системе генератор – двигатель с асинхронным гонным двигателем для грузоподъемной лебедки.
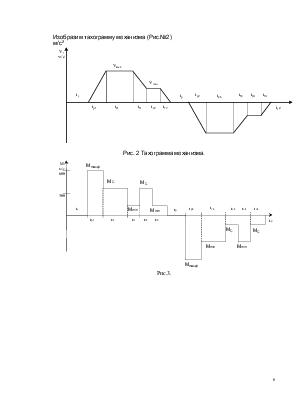
В цикл работы тележки входят операции:
- загрузка тележки
- разгон тележки до максимальной установившейся скорости подъема
- установившееся движение на максимальной скорости подъема
- торможение до пониженной скорости Vmin
- установившееся движение на пониженной скорости
- торможение тележки в конце пути до полной остановки
- разгрузка тележки
- разгон пустой тележки до максимальной скорости спуска
- установившееся движение на максимальной скорости спуска
- торможение до пониженной скорости Vmin
- установившееся движение на пониженной скорости
- торможение тележки в конце пути спуска до полной остановки
После загрузки цикл повторяется. В неподвижном состоянии тележка удерживается электромагнитным тормозом
Разрабатываемая система должна обеспечить требуемые свойства и характеристики. Главной задачей нашей разработки является правильный выбор двигателя для нашей системы. Если мы выберем двигатель большей мощности это приводит к увеличению затрат и эксплуатационных расходов, к ненужным затратам на изготовление двигателя и т.д.
4.2 Краткое описание конструкции кинематическая схема механизма. Описание режимов работы. Формулирование требований к электроприводу.
Характеристика технического объекта.
Грузоподъемная тележка предназначена для
автоматизации и механизации технологических процессов подъема грузов mГ = 5000 кг на высоту
60 метров по наклонной плоскости , с углом наклона ![]() = 45 градусов.
= 45 градусов.
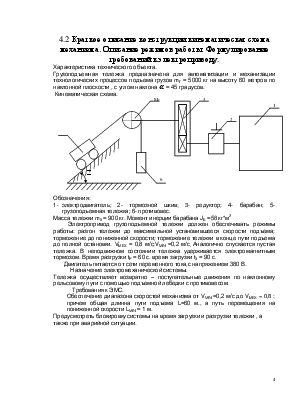
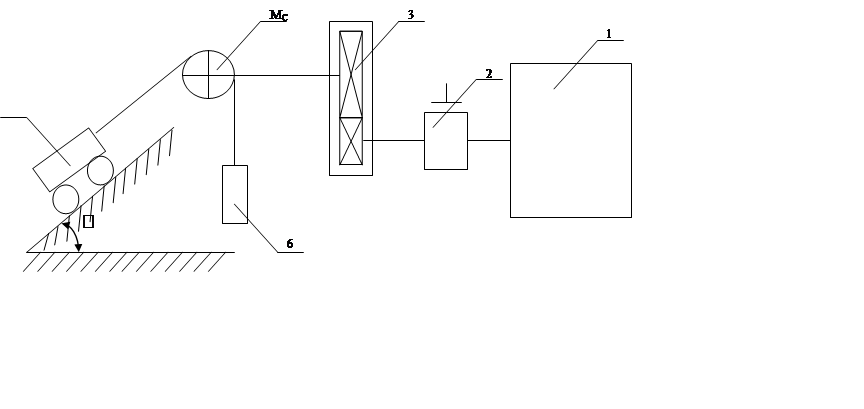 Кинематическая
схема.
Кинематическая
схема.
Обозначения:
1- электродвигатель; 2- тормозной шкив; 3- редуктор; 4- барабан; 5- грузоподъемная тележка; 6- противовес.
Масса тележки m0 = 900 кг. Момент инерции барабана JБ =58 кг*м2
Электропривод грузоподъемной тележки должен обеспечивать режимы работы: разгон тележки до максимальной установившееся скорости подъема; торможение до пониженной скорости; торможение тележки в конце пути подъема до полной остановки. VМЕХ = 0,8 м/с;VMIN =0,2 м/с. Аналогично спускается пустая тележка. В неподвижном состоянии тележка удерживается электромагнитным тормозом. Время разгрузки tР = 60 с. время загрузки tЗ = 90 с.
Двигатель питается от сети переменного тока,с напряжением 380 В.
Назначение электромеханической системы.
Тележка осуществляет возвратно – поступательные движения по наклонному рельсовому пути с помощью подъемной лебедки с противовесом.
Требования к ЭМС.
Обеспечение диапазона скоростей механизма от VMIN =0,2 м/с до VМЕХ = 0,8 ; причем общая длинна пути подъема L=60 м., а путь перемещения на пониженной скорости LMIN = 1 м.
Предусмотреть блокировку системы на время загрузки и разгрузки тележки , а также при аварийной ситуации.
4.4 Выбор мощности электродвигателя
Исходя из условия равенства результирующих сил, при подъеме груженой тележки и спуске пустой определим массу противовеса.

 |
Результирующее усилие на барабане электропривода :
 |

Момент статического сопротивления без учета веса троса и упругих деформаций троса :
М 24000*0,8/2=9600 H∙м
24000*0,8/2=9600 H∙м
Примем λ=2,5 - перегрузочная способность
Мmax МЕХ=ММЕХ∙ λ= МДИН+ ММЕХ
МДИН= Мmax МЕХ- ММЕХ=λ∙ММЕХ-ММЕХ=1,5 ММЕХ
МДИН=1∙9600=9600 Н∙м
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.