|
|
|
|
|
|
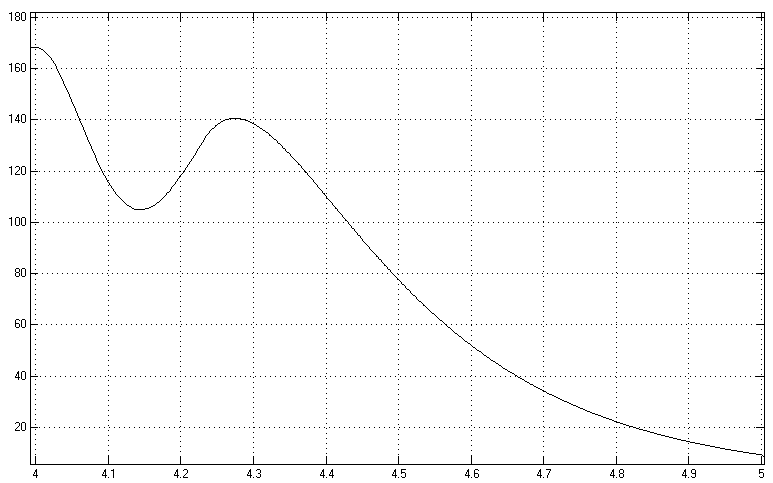
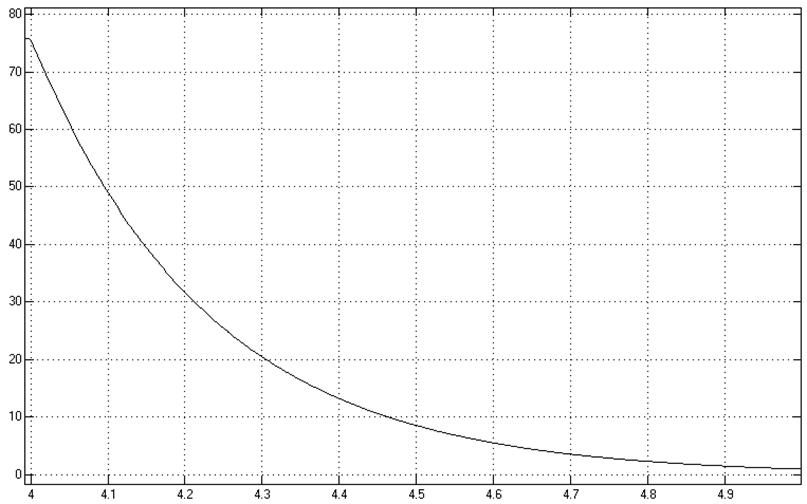 Рис.18 (ЭДС
генератора)
Рис.18 (ЭДС
генератора)
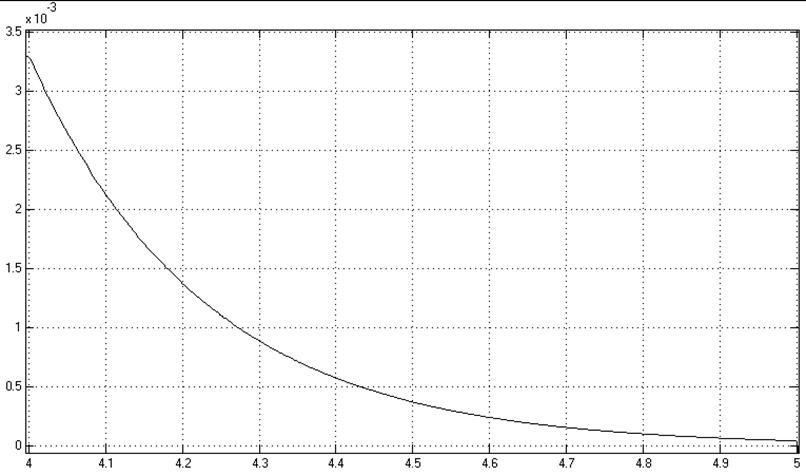
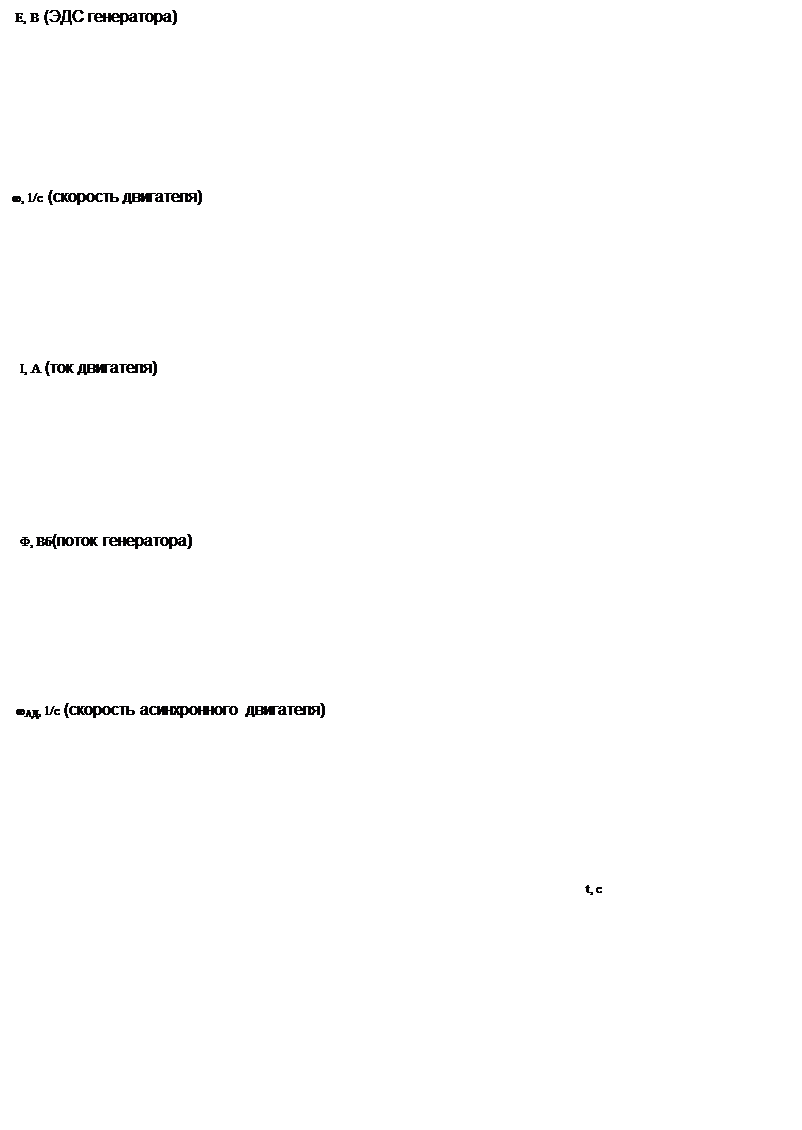 Переходныепроцессызавсевремя подъема .
Переходныепроцессызавсевремя подъема .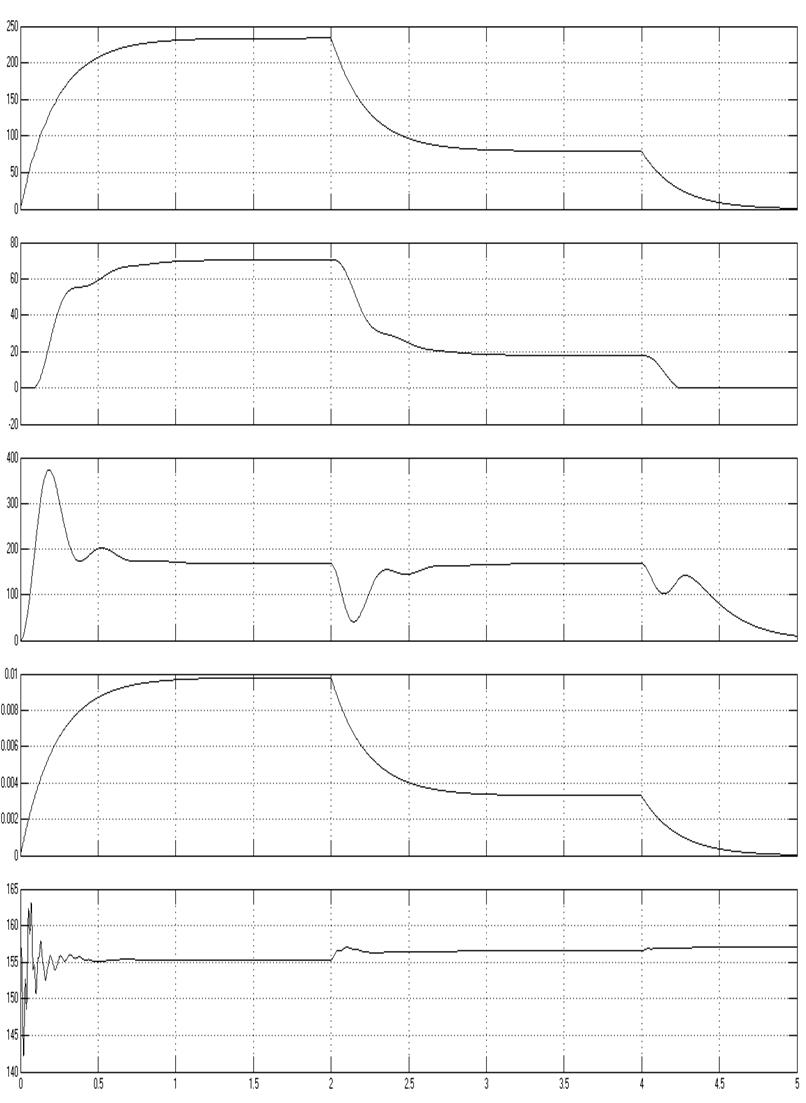
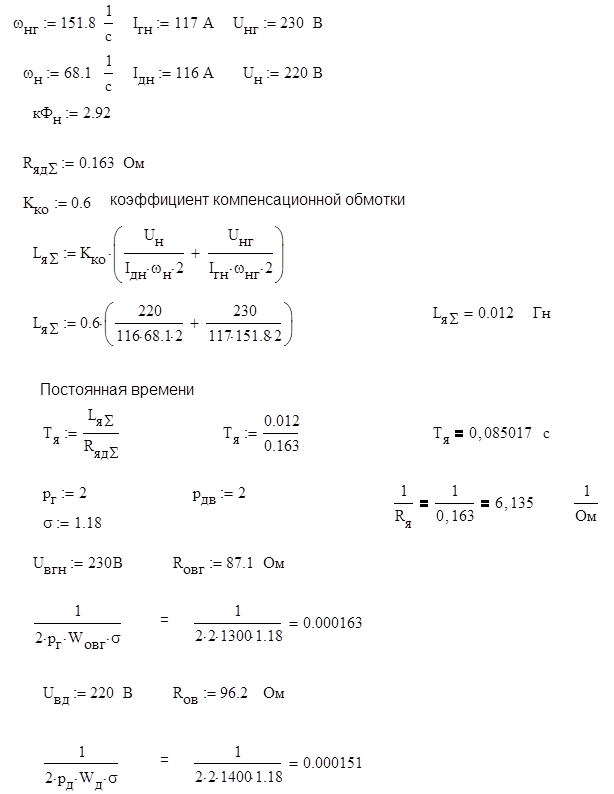
4.7.3 Расчет параметров и коэффициентов математической модели.
Расчёт коэффициентов для схемы асинхронного двигателя.
|
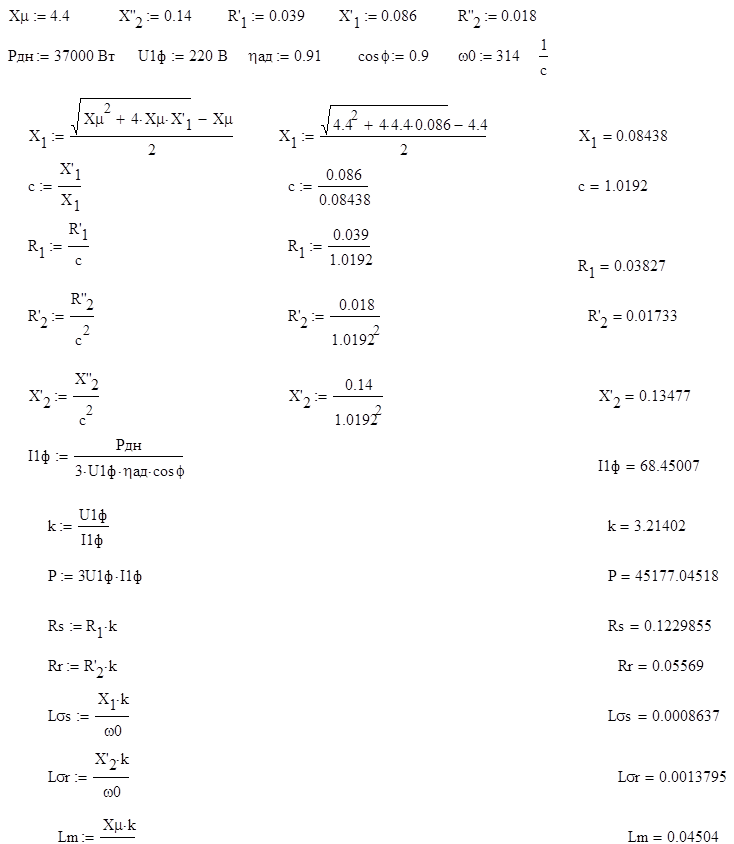
Рассчитаем оставшиеся коэффициенты, которые необходимы для моделирования.
 |
4.7.4 Анализ переходных процессов.
Сравниваем параметры получившиеся расчетным путем и путем моделирования.
ЭДС двигателя и генератора :
dег=Еген.рас-Еген / Еген.рас=0,22% dед=Еген.рас-Еген / Еген.рас=2,4%
Скорость вращения двигателя и генератора :
dшг=wген.рас-wген /wген.рас=1,2% dшд=wд.рас-wд /wд.рас=2,75%
Ток якорной цепи :
diя=iя.рас-iя /iя.рас=13%
Получается, что погрешность между расчетными и полученными при моделирование значениями составляет не больше 5%, а для iя d=13%.
4.8 Расчет потерь в электроприводе с учетом переходных процессов.
4.8.1 Определение средней взвешенной КПД за цикл работы.
Средневзвешенный КПД за цикл работы определяется как ;
h=(Wвых /Wэп ген)*100%
Wвых – выходная энергия на валу двигателя
Wвых= Мдв(t)w(t)dt
Wэп ген-электрическая энергия генеракора
Wэп ген= eген(t)iя(t)dt
h=82.7%
4.8.2 Проверка мощности электродвигателя методом средних потерь.
Для проверки двигателя по нагреву определяется средняя мощность потерь за цикл.
Определяем
![]() из программы MATLAB.
из программы MATLAB.
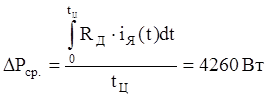 |
ΔPН =1162∙0,163=4618,16 Вт
4618,16>4260
Условие выполняется, поэтому мощность двигателя выбрана верно.
4.9 Разработка принципиальной электрической схемы управление электропривода.
Принципиальная электрическая схема представлена ниже на рисунке.
Объясним представленные на схеме обозначения :
FU1, FU2,FU3-предохранители от коротких замыканий.
SQ1, SQ2- предохранители от снижения питающего напряжения.
SA2-командоконтроллер.
KM1-7-контакторы.
M1-гонный асинхронный двигатель.
G-генератор.
M-двигатель.
DПГ, DПД-дополнительные полюсы генератора идвигателя.
LC, Lm-обмотки возбуждения.
Rдт- сопротивление динамического торможения.
ТВГ, ТВD- тиристорный возбудитель генератора и двигателя.
Rв- сопротивление обмотки возбуждения.
Rп- пусковой реостат.
SA1-силовой рубильник.
КК- блок максимальных реле.
QF-выключатели.
KMD-контактор динамического торможения.
КМ9- контактор включения электромашинного тормоза.
Автоматическое управление осуществляется с помощью путевых переключателей (QS1-6) и реле времени (КТ1, КТ2).
QS1-аварийный выключатель при движение вверх.
QS2-аварийный выключатель при движение вниз.
QS3-торможение с Vмех доVmin.
QS4-торможение до остановки.
QS5-торможение с Vмех доVmin при движение вниз.
QS6-торможение до остановки.
Ручное управление осуществляется с помощью командоконтроллера с двумя положениями.
4.10 Заключение и выводы по работе.
В ходе выполнения РГР был разработан электропривод передвижения грузоподъёмной лебёдки. В результате расчёта и структурного моделирования данной системы Г-Д в программе “MATLAB” было установлено, что с заданными требованиями она справляется. Что модель набранная в программе “MATLAB” функционирует.
Система генератор-двигатель является одной из основных систем управления электропривода. Она имеет наибольшую надёжность и стабильность в процессе работы.
4.11 Список литературы.
1. Основы автоматизированного электропривода / М.Г.Чиликин и др. - М.: Энергия, 1974. - 568 с.
2. Ключев В.М., Чиликин М.Г., Сандлер А.С. Теория автоматизированного электропривода, - М.: Энергия, 1969. - 616 с.
3. Машины постоянного тока серии 2П. Электротехника СССР. –
М: Информэлектро, 1980
4. Асинхронные двигатели серии 4А: Справочник. - М.: Энергоиздат 1982. - 504 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.