




1.Цель работы
Ознакомиться и изучить составные элементы тиристорного электропривода постоянного тока с совместным управлением. Исследовать статические и динамические характеристики.
2.Основные теоретические положения
В настоящие время в электроприводе при создании систем регулирования нашёл широкое применение принцип последовательной коррекции или так называемого подчинённого регулирования [1+3].
Сущность его заключается в следующем. Объект регулирования представляется в виде последовательно соединённых звеньев, выходными координатами которых является, например, напряжение, скорость, положение и др.
Для управления каждой из этих координат организуется отдельный регулятор, образующий с объектом контур, замкнутый соответствующей обратной связью. Регуляторы соединяются последовательно так, что выход одного является входом другого.
При этом замкнутые контуры регулирования образуют систему, в которой имеется внутренний контур управления, состоящий из регулятора и одного из звеньев объекта управления.
Выходной сигнал регулятора каждого внешнего контура является задающим для последующего, заключённого внутреннего контура. Таким образом, каждый внутренний контур регулирования подчинён соответствующему внешнему.
Передаточная функция регулятора определяется структурой и параметрами соответствующего звена объекта регулирования, а также условиями оптимизации этого контура. Наибольшее распространение получили два критерия оптимизации: модульный (технический) и симметричный оптимум [1+3].
При настройке на модульный оптимум передаточная функция разомкнутого контура регулирования имеет вид (1), а лагарифмическая амплитудно-частотная характеристика показана на рис. 1,а.
 , (1)
, (1)
где Tμ – суммарная некомпенсируемая постоянная времени контура регулирования; α = T0/Tμ – коэффициент соотношения постоянных времени T0 и Tμ , определяет степень демпфирования переходных процессов.
Требуемые показатели колебательности и перерегулирования в замкнутой системе обеспечиваются выбором величины коэффициента α , а быстродействие определяется только суммарной некомпенсируемой постоянной Tμ. При α = 2 (стандартная настройка на модульный оптимум) обеспечивается минимальное время первого согласования (tp= 4,7Tμ) при перерегулировании меньшем 5%. При уменьшении коэффициента α колебательность переходного процесса и перерегулирования увеличивается, а при увеличении уменьшаются (рис. 1, б ). Выбором соотношения постоянных в пределах α = 1+4 можно обеспечить хорошие динамические показатели.
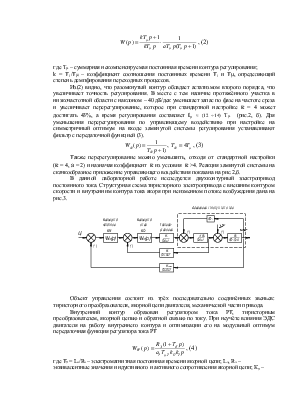
При настройке на симметричный оптимум передаточная функция разомкнутого контура регулирования имеет вид (2), а логарифмическая амплитудно-частотная характеристика показана на рис.2,а.
 , (2)
, (2)
где Tμ – суммарная некомпенсируемая постоянная времени контура регулирования;
k = T1/Tμ – коэффициент соотношения постоянных времени T1 и Tμ, определяющий степень демпфирования переходных процессов.
Из(2) видно, что разомкнутый контур обладает астатизмом второго порядка, что увеличивает точность регулирования. В месте с тем наличие протяжённого участка в низкочастотной области с наклоном – 40 дБ/дек уменьшает запас по фазе на частоте среза и увеличивает перерегулирование, которое при стандартной настройке к = 4 может достигать 43%, а время регулирования составляет tр ≈ (12 ÷14) Tμ (рис.2, б). Для уменьшения перерегулирования по управляющему воздействию при настройке на симметричный оптимум на входе замкнутой системы регулирования устанавливают фильтр с передаточной функцией (3).
 ,
, ![]() , (3)
, (3)
Также перерегулирование можно уменьшить, отходя от стандартной настройки (к = 4, а = 2) и назначая коэффициент к из условия к >4. Реакция замкнутой системы на скачкообразное приложение управляющего воздействия показана на рис.2,б.
В данной лабораторной работе исследуется двухконтурный электропривод постоянного тока. Структурная схема тиристорного электропривода с внешним контуром скорости и внутренним контура тока якоря при неизменном потоке возбуждения дана на рис.3.
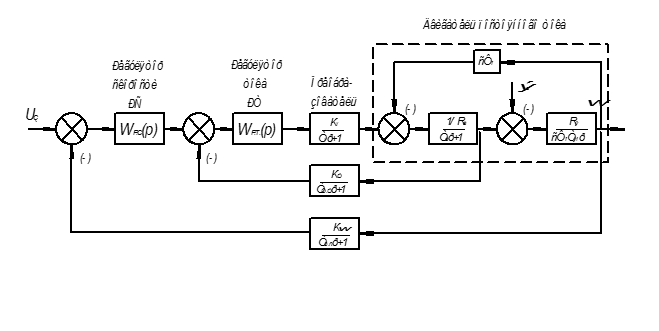
Объект управления состоит из трёх последовательно соединённых звеньев: тиристорного преобразователя, якорной цепи двигателя, механической части привода.
Внутренний контур образован регулятором тока РТ, тиристорным преобразователем, якорной цепью и обратной связью по току. При неучёте влияния ЭДС двигателя на работу внутреннего контура и оптимизации его на модульный оптимум передаточная функция регулятора тока РТ
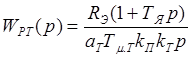 , (4)
, (4)
где Тл = Lэ/Rэ – электромагнитная постоянная времени якорной цепи; Lэ, Rэ – эквивалентные значения индуктивного и активного сопротивления якорной цепи; Кл –коэффициент усиления тиристорного преобразователя; Кт – коэффициент обратной связи по току; ат – коэффициент пропорциональности токового контура (ат = Т0/Тμт ); Тμт = Тп + Тф.т –суммарная малая постоянная времени; Тп, Тф.т – соответственно, постоянные времени преобразователя и фильтра датчика тока.
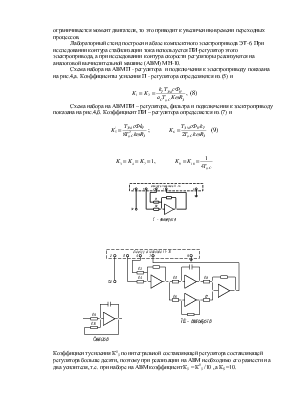
Таким образом, контур тока сбалансируется пропорционально-интегральным регулятором (ПИ-регулятором).
При оптимизации контура скорости на модульный оптимум передаточная функция регулятора скорости РС
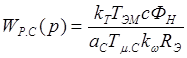 , (5)
, (5)
где
сФн – коэффициент пропорциональности ЭДС и скорости двигателя
постоянного тока; 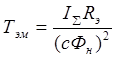 - электромеханическая
постоянная времени; IS - суммарный момент инерции
привода; Тμс = 2 Тμт + Тф.с –
эквивалентная малая постоянная времени контура скорости; Тф.с – постоянная
времени фильтра в цепи обратной связи по скорости; Кω – коэффициент обратной
связи по скорости; ас – коэффициент
пропорциональности контура скорости (ас
= Тс/ Тμс).
- электромеханическая
постоянная времени; IS - суммарный момент инерции
привода; Тμс = 2 Тμт + Тф.с –
эквивалентная малая постоянная времени контура скорости; Тф.с – постоянная
времени фильтра в цепи обратной связи по скорости; Кω – коэффициент обратной
связи по скорости; ас – коэффициент
пропорциональности контура скорости (ас
= Тс/ Тμс).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.