Так как регулятор пропорциональный, то замкнутая система стабилизации скорости обладает ошибкой регулирования по управляющему и возмущающему воздействиям в установившемся режиме. Статическая посадка скорости при действии возмущающего воздействия определяется выражением (6)
 , (6)
, (6)
Поскольку
величина  характеризуется просадку скорости
разомкнутой системы, ясно что в замкнутой системе с подчинённым токовым
контуром ошибка будет тем меньше, чем меньше Тμс по сравнению с Тэм . Если эта статическая ошибка
недопустима велика, контур стабилизации скорости необходимо настраивать на
симметричный оптимум.
характеризуется просадку скорости
разомкнутой системы, ясно что в замкнутой системе с подчинённым токовым
контуром ошибка будет тем меньше, чем меньше Тμс по сравнению с Тэм . Если эта статическая ошибка
недопустима велика, контур стабилизации скорости необходимо настраивать на
симметричный оптимум.
Для двухкратноинтегрирующей системы регулирования скорости, настроенной на симметричный оптимум ( к = 4, ас = 2),передаточная функция регулятора скорости РС имеет вид (7) при условии, что токовый контур настроен на модульный оптимум (ат = 2)
 , (7)
, (7)
где
 - коэффициент усиления П-регулятора
скорости (5) при ас = 2 и коэффициент
пропорциональной части ПИ-регулятора (7);
- коэффициент усиления П-регулятора
скорости (5) при ас = 2 и коэффициент
пропорциональной части ПИ-регулятора (7); ![]() -
постоянная времени интегрирования интегральной части ПИ-регулятора скорости
(7).
-
постоянная времени интегрирования интегральной части ПИ-регулятора скорости
(7).
Расчётное время регулирования в линеаризованной системе стабилизации скорости с П- или ПИ-регуляторами при действии управляющего воздействия можно определить по графикам, показанным на рис. 1,б и 2,б, с учетом выбранного критерия оптимезации и масштаба времени, разного t/Tμс .
При исследовании на лабораторном стенде данный режим можно организовать, подавая на вход системы «малые» задающие воздействия. При действии «больших» задающих воздействий работает токоограниченые, основанное на ограничении сигнала с выхода регулятора скорости. Так как в этом случае в динамических режимах ограничивается момент двигателя, то это приводит к увеличению времени переходных процессов.
Лабораторный стенд построен на базе комплектного электропривода ЭТ-6. При исследовании контура стабилизации тока используется ПИ-регулятор этого электропривода, а при исследовании контура скорости регуляторы реализуются на аналоговой вычислительной машине (АВМ) МН-10.
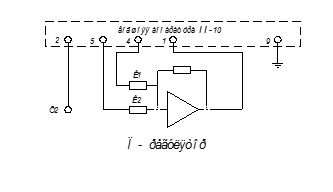
Схема набора на АВМ П - регулятора и подключения к электроприводу показана на рис.4,а. Коэффициенты усиления П - регулятора определяются из (5) и
 , (8)
, (8)
Схема набора на АВМ ПИ – регулятора, фильтра и подключения к электроприводу показана на рис.4,б. Коэффициент ПИ – регулятора определяется из (7) и
 ;
;  (9)
(9)
![]() ,
, 
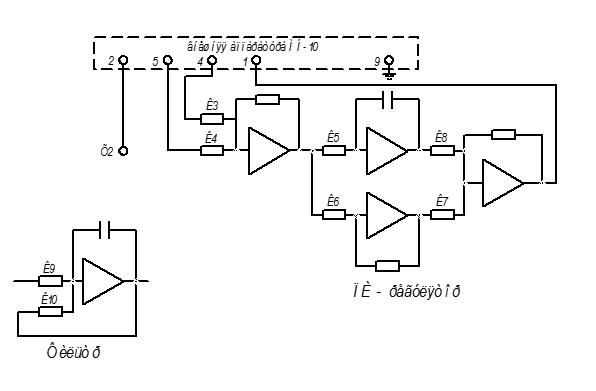
Коэффициент усиления К15 по интегральной составляющей регулятора составляющей регулятора больше десяти, поэтому при реализации на АВМ необходимо его разнести на два усилителя, т.е. при наборе на АВМ коэффициент К5 = К15 /10 , а К8 =10.
Необходимые данные для расчётов коэффициентов регуляторов приведены в таблице раздела 3.
3.Краткое описание лабораторной установки
Исследование статических и динамических характеристик электропривода постоянного тока производится по лабораторной установке, выполненного на базе комплектного тиристорного электропривода ЭТ – 6 [4,5] и включающий следующие функциональные элементы (рис.5):
1) тиристорный реверсивный преобразователь с совместным управлением;
2) используемый двигатель постоянного тока М1;
3) двигатель постоянного тока нагрузочного устройства М2;
4) генератор G1 и гонный двигатель М3 нагрузочного устройства;
5) аналоговую вычислительную машинку МН-10м;
6) измерительные приборы;
7) коммутационную аппаратуру.
Тиристорный преобразователь является управляемым двухполярным шестипульсным выпрямителем, состоящим из силовой схемы, схемы формирования управляющих импульсов (СИФУ), схема ограничения минимального угла управления, схемы ограничения тока якоря (УОТЯ), регулятора тока (РТ) с датчиком тока (ДТ) и схемой ограничения производственной РТ (УОП), регулятора скорости (РС), схемы защиты (СЗ), источника питания (ИСП). Описание работы функциональных устройств преобразователя приведено в [4,5] . Основные параметры лабораторного стенда, необходимые для расчёта регуляторов, даны в таблице.
Основные параметры стенда
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.