|
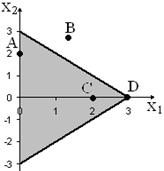
1) A 2) B 3) C 4) D |
а) узловая б) крайняя в) граничная г) внутренняя д) особая е) недопустимая |
|
(Эталон: 1 – в; 2 – е; 3 – г; 4 – б)
14. Содержательный смысл целевой функции в задаче производственного планирования на минимум…
а) себестоимость
б) мощность
в) сырье
г) прибыль
(Эталон: а)
15. Условие, которому отвечает замкнутая транспортная задача, – …
а) равенства
б) баланса
в) эквивалентности
г) устойчивости
д) оптимальности
(Эталон: б)
16. Методы одномерной оптимизации:
а) дихотомии
б) наискорейшего спуска
в) золотого сечения
г) адаптивный случайного поиска
д) релаксации
(Эталон: а; в; г)
17. Метод, используемый при решении задач оптимизации, в которых управление и координаты объекта могут иметь разрывы, – _________ _________.
(Эталон: принцип максимума)
1. Схема метода Эйлера…
а) ![]()
б) ![]()
в) ![]()
г) ![]()
(Эталон: а)
2. Метод Эйлера предназначен для решения обыкновенных дифференциальных уравнений _________ порядка
(Эталон: первого; первый)
4. Динамическое программирование позволяет одну задачу со многими переменными заменить…
а) рядом последовательно решаемых задач с меньшим числом переменных
б) группой различных задач, с одинаковым числом переменных
в) рядом произвольно решаемых задач, с одинаковым числом переменных
г) группой последовательно решаемых задач с большим числом переменных
(Эталон: а)
5. Основной принцип оптимизации многошагового процесса и особенность вычислительного метода динамического программирования, принцип оптимальности _________
(Эталон: Беллмана; Беллман)
21. Множество X, на котором оптимизируется f(x), …
а) допустимое
б) основное
в) дополнительное
г) точное
д) оптимальное
(Эталон: а)
5. Функция, имеющая более одного экстремума, называется …
а) унимодальной
б) мультимодальной
в) мономодальной
г) целевой
(Эталон: б)
23. Точка х*ÎХ – решение задачи условной оптимизации при …
а) ![]()
б) ![]()
в) ![]()
г) ![]()
д) ![]()
(Эталон: г)
24. Точка х*ÎХ является глобальным решением задачи оптимизации, если выполняются условия:
а) ![]()
б) ![]()
в) ![]()
г) ![]()
(Эталон: а, б)
26. Верно утверждение – …
а) метод наискорейшего спуска относится к алгоритмам нулевого порядка
б) методы исключения интервалов являются алгоритмами нулевого порядка
в) метод дихотомии является алгоритмом первого порядка
г) к алгоритмам первого порядка относят алгоритмы, использующие информацию о значениях целевой функции и ее первых и вторых производных
(Эталон: б)
27. Верны утверждения:
а) алгоритмы нулевого порядка используют информацию о значениях целевой функции и ее вторых производных
б) алгоритмы первого порядка используют информацию о значениях целевой функции
в) алгоритмы нулевого порядка используют информацию о значениях целевой функции и ее первых производных
г) алгоритмы первого порядка используют информацию о значениях целевой функции и ее первых производных
д) алгоритмы второго порядка используют информацию о значениях целевой функции
(Эталон: б; г; д)
45. Точка х0, не лежащая на отрезке между двумя любыми точкам выпуклого многогранного множества М отличными от x0, называется …
а) узловой
б) крайней
в) граничной
г) внутренней
д) особой
(Эталон: б)
46. Вершины многогранника – это … точки.
а) узловые
б) крайние
в) граничные
г) внутренние
д) особые
(Эталон: б)
47. Если решение задачи линейного программирования существует, то оно обязательно достигается на _________ допустимой области.
(Эталон: границе; граница)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.