ФУНКЦИОНАЛЬНАЯ СХЕМА ГИРОКОМПАСА
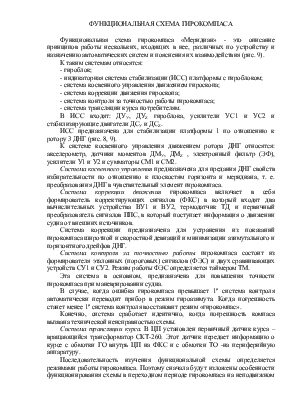
Функциональная схема гирокомпаса «Меридиан» - это описание принципов работы нескольких, входящих в нее, различных по устройству и назначению автоматических систем и пояснения их взаимодействия (рис. 9).
К таким системам относятся:
- гироблок;
- индикаторная система стабилизации (ИСС) платформы с гироблоком;
- система косвенного управления движением гироскопа;
- система коррекции движения гироскопа;
- система контроля за точностью работы гирокомпаса;
- система трансляции курса потребителям.
В ИСС входят: ДУУ, ДУZ гироблока, усилители УС1 и УС2 и стабилизирующие двигатели ДСУ и ДСZ.
ИСС предназначена для стабилизации платформы 1 по отношению к ротору 3 ДНГ (рис. 8, 9).
К системе косвенного управления движением ротора ДНГ относятся: акселерометр, датчики моментов ДМУ, ДМZ , электронный фильтр (ЭФ), усилители У1 и У2 и сумматоры СМ1 и СМ2.
Система косвенного управления предназначена для предания ДНГ свойств избирательности по отношению к плоскостям горизонта и меридиана, т. е. преобразования ДНГ в чувствительный элемент гирокомпаса.
Система коррекции движения гирокомпаса включает в себя формирователь корректирующих сигналов (ФКС) в который входят два вычислительных устройства ВУ1 и ВУ2, термодатчик ТД и первичный преобразователь сигналов ППС, в который поступает информация о движении судна от внешних источников.
Система коррекции предназначена для устранения из показаний гирокомпаса широтной и скоростной девиаций и минимизации азимутального и горизонтного дрейфов ДНГ.
Система контроля за точностью работы гирокомпаса состоит из формирователя эталонных (пороговых) сигналов (ФЭС) и двух сравнивающих устройств СУ1 и СУ2. Режим работы ФЭС определяется таймером ТМ.
Эта система в основном, предназначена для повышения точности гирокомпаса при маневрировании судна.
В случае, когда ошибка гирокомпаса превышает 1º система контроля автоматически переводит прибор в режим гироазимута. Когда погрешность станет менее 1º система контроля восстановит режим «гирокомпас».
Конечно, система сработает идентично, когда погрешность компаса вызвана технической неисправностью схемы.
Система трансляции курса. В ЦП установлен первичный датчик курса – вращающийся трансформатор СКТ-260. Этот датчик передает информацию о курсе с обмотки ГО внутрь ЦП на ФКС и с обмотки ТО -на периферийную аппаратуру.
Последовательность изучения функциональной схемы определяется режимами работы гирокомпаса. Поэтому сначала будут изложены особенности функционирования схемы в переходном периоде гирокомпаса на неподвижном основании, от момента его запуска до момента прихода в меридиан, а затем в рабочем режиме на ходу судна.
4.1. Функциональная схема гирокомпаса «МЕРИДИАН» (переходный режим)
Начальными условиями для функционирования схемы являются:
- неподвижность судна (Vc = 0, ИК = const);
- ввод значения широты места судна в преобразователь первичных сигналов ППС.
В переходном периоде гирокомпаса имеются следующие этапы:
- разгон гироскопа;
- подготовка индикаторной системы стабилизации ИСС к работе;
- ускоренное автогоризонтирование гироскопа;
- ускоренное с заданной точностью автоприведение гироскопа в меридиан.
В момент времени to на гирокомпас подается питание и таймер ТМ, в соответствии с заложенной в него программой, начинает определять порядок подключения различных участков схемы к работе (рис. 9).
Этап разгона гироскопа.
В момент to по команде ТМ «Форсаж» подается напряжение в блок питания БП2, который формирует двухфазное напряжение 18 В частотой 480 Гц для разгона двигателя ДНГ.
По этой же команде подается напряжение на усилителям УС1 и УС2, но управляющие сигналы с ДУ не поступают. "Форсаж" продолжается 68 с.
Этап подготовки ИСС к работе.
После окончания разгона гироскопа, в момент времени t1 = 68 с таймер снимает команду "Форсаж" и подает команду "Подготовка".
Напряжение питания двигателя Д понижается до 10 В, и включается управление следящей системой от ДУZ и ДУУ.
Датчики углов ДУУ и ДУz автоматически подключаются к усилителям УС1 и УС2. Сигналы о рассогласовании платформы с гироскопом поступают с датчиков углов, через усилители УС1 и УС2 на стабилизирующие двигатели ДСУ и ДСZ. Платформа быстро согласовывается с главной осью гироскопа. Скорость согласования достигает 200°/с. С этого момента времени двухканальная ИСС находится в рабочем состоянии.
Отрабатывая эти сигналы, двигатель обеспечивает постоянное удержание гироблока, а следовательно и платформы, в таком положении, когда его продольная ось совмещена с главной осью ротора гироскопа.
Следует отметить, что оба канала управления ИСС за счет введения интегрального управления обладают астатизмом первого порядка по отношению к постоянным возмущающим моментам.
Благодаря этому качеству система индикаторной стабилизации обеспечивает безмоментный подвес гироблока.
Ускоренное автогоризонтирование гироблока
В момент t2 = 120 с таймер снимает команду "Подготовка" и подает команду "ГА".
В момент времени t2 таймер командой ГА закрывает вход для сигнала "β" в усилитель У1, и открывает вход для этого сигнала в У2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.