21. Влияние движения судна на гирокомпас.
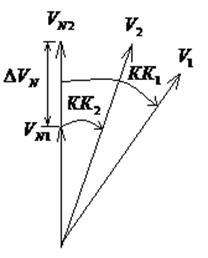
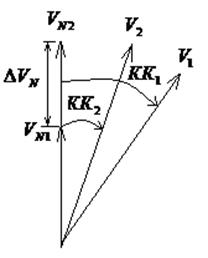
Поскольку движение судна происходит по земной сфере существование линейных скоростей неизбежно вызовет появление некоторых угловых скоростей. Поле угловых скоростей – совокупность всех угловых скоростей, которую воспринимает компас на судне(которое идет с постоянной скоростью и курсом).
 эти формулы определяют
поле угловых скоростей, которое воспринимает гирокомпас установленный на
движущемся судне(треугольник угловых скоростей).
эти формулы определяют
поле угловых скоростей, которое воспринимает гирокомпас установленный на
движущемся судне(треугольник угловых скоростей).
Найдем ![]() :
: 
 (1);
(1);
 - погрешность
гирокомпаса при движении судна с постоянным курсом и скоростью. Скоростная
девиация - отклонение компасного меридиана от истинного. Из формулы (1)
вытекают основные закономерности
- погрешность
гирокомпаса при движении судна с постоянным курсом и скоростью. Скоростная
девиация - отклонение компасного меридиана от истинного. Из формулы (1)
вытекают основные закономерности ![]() : 1. возникновение
: 1. возникновение
![]() обуславливается наличием у судна
северной составляющей скорости движения 2. девиация линейно зависит от скорости
судна 3.
обуславливается наличием у судна
северной составляющей скорости движения 2. девиация линейно зависит от скорости
судна 3. ![]() имеет полукруговой характер
зависимости от компасного курса (она = 0 при К=90 и 270 градусов, а мах
значение при К=0 и 180 градусов) 4. зависимость
имеет полукруговой характер
зависимости от компасного курса (она = 0 при К=90 и 270 градусов, а мах
значение при К=0 и 180 градусов) 4. зависимость ![]() от
широты определяется функций 1/соsφ=secφ,
поэтом особенно резкие увеличения ее численного значения происходят в широтах
выше 70 град. (Радиус земли на угловую скорость земли – линейная скорость точки
земной поверхности лежащей на экваторе примерно = 900 уз.)
от
широты определяется функций 1/соsφ=secφ,
поэтом особенно резкие увеличения ее численного значения происходят в широтах
выше 70 град. (Радиус земли на угловую скорость земли – линейная скорость точки
земной поверхности лежащей на экваторе примерно = 900 уз.)
Учет ![]() : 1. при
использовании таблиц скоростной девиации(номограмм) 2. с помощью
электромеханических устройств – корректоров(ввод V и φ производился с помощью
дистанционного управления корректором, при пуске компаса -
: 1. при
использовании таблиц скоростной девиации(номограмм) 2. с помощью
электромеханических устройств – корректоров(ввод V и φ производился с помощью
дистанционного управления корректором, при пуске компаса - ![]() исключают при помощи номограммы на
корректоре) 3. с помощью навигационного микропроцессора 4. по формуле когда
либо отказал корректор, либо при отказе следящей системы.
исключают при помощи номограммы на
корректоре) 3. с помощью навигационного микропроцессора 4. по формуле когда
либо отказал корректор, либо при отказе следящей системы.
Судя по формуле (1) , ![]() не
зависит от наших параметров гирокомпаса, на любом гирокомпасе она одинакова.
не
зависит от наших параметров гирокомпаса, на любом гирокомпасе она одинакова.
Критическая широта , при ней происходит полная
неработоспособность гирокомпаса, т.е. соблюдается следующее условие 
 - от 0 до 180 град
- от 0 до 180 град
 - для КК=270 (т.к. =-1) ;
Для V=40 уз – φкр=87 град. ; Для V=30
уз – φкр=88 град
- для КК=270 (т.к. =-1) ;
Для V=40 уз – φкр=87 град. ; Для V=30
уз – φкр=88 град
22. Гирокомпасы с автономным чувствительным элементом.
Гирокомпас – навигационное гироскопическое устройство предназначенное для указания плоскости истинного меридиана.
Гирокомпас с непосредственным управлением – гирокомпас чувствительный элемент которого представляет собой гироскоп, механически связанный с маятниковым устройством, которое управляет его движением с помощью момента силы тяжести.
При движении судна в гирокомпасе возникает ![]() , но наиболее важно – показания
точности на маневрировании. При маневрировании возникает изменение северной
составляющей скорости хода.
, но наиболее важно – показания
точности на маневрировании. При маневрировании возникает изменение северной
составляющей скорости хода.
![]() и возникает инерционная
девиация первого рода.
и возникает инерционная
девиация первого рода.
 Она имеет мах
значение по времени на окончание маневра, время существования ее после маневра
в φ менее 20 град. – 1.5 чсов, в φ средих – 1.5-2 часа, в φ высоких – 2-3 часа.
Она имеет мах
значение по времени на окончание маневра, время существования ее после маневра
в φ менее 20 град. – 1.5 чсов, в φ средих – 1.5-2 часа, в φ высоких – 2-3 часа.
Теорема Шулера- для того чтобы гирокомпас в своих показаниях
в результате любого маневра не получил инерционную девиацию первого рода
необходимо и достаточно сделать период собственных незатухающих колебаний
гирокомпаса (![]() ) равным периоду колебаний простого
математического маятника, длина которого =радиусу земли, примерно 84.4 минуты.
) равным периоду колебаний простого
математического маятника, длина которого =радиусу земли, примерно 84.4 минуты.
 будет равна периоду Шулера
будет равна периоду Шулера
Расчетная широта.
 С момента доказательства теоремы Шулера все гирокомпасы
принято делить на два класса: 1. гирокомпасы у которых теорема Шулера
выполняется только в одной широте – расчетной – это неапериодические (в России
60 град, в Германии 54.4) 2. . гирокомпасы у которых теорема Шулера выполняется
в неком диапазоне широт – апериодические 3. и неапериодические с микроэвм ,
которая вычисляет инерц. девиацию и исключает из показание репиторов.
С момента доказательства теоремы Шулера все гирокомпасы
принято делить на два класса: 1. гирокомпасы у которых теорема Шулера
выполняется только в одной широте – расчетной – это неапериодические (в России
60 град, в Германии 54.4) 2. . гирокомпасы у которых теорема Шулера выполняется
в неком диапазоне широт – апериодические 3. и неапериодические с микроэвм ,
которая вычисляет инерц. девиацию и исключает из показание репиторов.
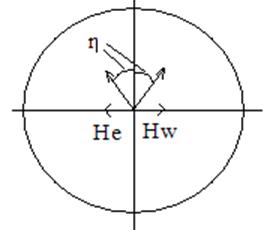
Апериодические –плохая устойчивость в высоких и низких широтах( 20-70 град), отсутствие инерционной девиации в этих широтах. Используется в широтах от 0 до 85 град при скорости до 50 уз. Ограничение по нижней широте в 20 град объясняется тем что при таком угле η (этта) составляющие Не и Нw становятся настолько малыми , что это начинает сказываться на точность компаса в условиях качки, т.к. именно величина этих составляющих определяет величину девиации на качке и чем меньше они тем больше девиация.
23. Влияние маневрирования судна на точность ГК с автоном чувствительным элементом.
Гирокомпас – навигационное гироскопическое устройство предназначенное для указания плоскости истинного меридиана.
Гирокомпас с непосредственным управлением – гирокомпас чувствительный элемент которого представляет собой гироскоп, механически связанный с маятниковым устройством, которое управляет его движением с помощью момента силы тяжести.
При движении судна в гирокомпасе возникает ![]() , но наиболее важно – показания
точности на маневрировании. При маневрировании возникает изменение северной
составляющей скорости хода.
, но наиболее важно – показания
точности на маневрировании. При маневрировании возникает изменение северной
составляющей скорости хода.
![]() и возникает инерционная
девиация первого рода.
и возникает инерционная
девиация первого рода.
Особенности девиаций первого рода: 1. причина появления-должны существовать одновременно два условия: -изменение северной составляющей скорости судна –и когда φ не равна φ критической или преиод собственных незат колебаний не равен периоду Шулера ; а у второго рода наличие изменения северной составляющей скорости хода 2. зависит от широты места маневра, а второго рода не зависит 3. имеет мах значение по времени на окончание маневра, время существования ее после маневра в φ менее 20 град. – 1.5 чсов, в φ средих – 1.5-2 часа, в φ высоких – 2-3 часа ; а у второго рода чеез 20 минут после завершения маневра, время сущ в φ 0-25 – 1 час, в φ 25-60 – 1.5 часа, в φ более 60 - 2-2.5 часа 4. способ получения в чистом виде: выключить затухание – жидкость не будет перетекать ; а у второго рода – маневр на φ=φрасчетной.
24. Требования к точности на маневрировании.
А.424: 1. φ=0-70 и V= до 30 уз 2. предельно допустимая погрешность при изменении скорости +- 2 градуса 3. при V= 30 уз и быстрой полуциркуляции предельно допустимая погрешность +- 3 градуса
А.821: 1. для φ=0-70 и V=30-70 уз 2. предельно допустимая погрешность при изменении скорости +-2 град. 3. при V= 70 уз и полуциркуляции +-3 град
Накопление суммарной инерционной девиации.
Если судно совершает повторные маневры и время между ними невелико, то девиация от первого и второго маневра может суммироваться. Академик Крылов доказал что это время равно половине периода затухающих колебаний гирокомпаса в данной широте места. Соответственно следует избегать таких маневров.
Использование математических моделей для цели снижения инерционных девиаций.
Сущность- в комплект компаса вводится приставка nautocourset, в которой находится навигационный микропроцессор, в который заложена математ модель в виде следующей системы дифференциальных уравнений
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.