 Н – горизонтная
составляющая, последняя формула – уравнение перетекания жидкости. В указанной
системе оператор должен был вести: Н,В,С,
Н – горизонтная
составляющая, последняя формула – уравнение перетекания жидкости. В указанной
системе оператор должен был вести: Н,В,С, ![]() (-известны
из паспорта), и VN, VE, φ.
Коррекция производилась только репиторов. (еще в этой приставке был цифровой
аналоговый преобразователь) . стандарт 20 также мог тестировать гирокомпас.
(-известны
из паспорта), и VN, VE, φ.
Коррекция производилась только репиторов. (еще в этой приставке был цифровой
аналоговый преобразователь) . стандарт 20 также мог тестировать гирокомпас.
25. Гирокомпас с корректируемым чувствительным элементом.
Все гирокомпасы делятся на корректируемые и нет, под коррекцией понимается устранение скоростной девиации с помощью дополнительных корректирующих моментов вырабатываемых в электронных вычислительных устройсвах.
Система диф уравнений:
![]() -собственный
гироскопический момент; γ-угол показывает мгновенное положение линии маятника
по отношении к средней линии ИГ;
-собственный
гироскопический момент; γ-угол показывает мгновенное положение линии маятника
по отношении к средней линии ИГ; ![]() - корректирующие
моменты, вырабатываются вычислительными устройствами;
- корректирующие
моменты, вырабатываются вычислительными устройствами; ![]() -
вредные моменты;
-
вредные моменты; ![]() -компенсирующие моменты.
-компенсирующие моменты.
Инерционная девиация.
Формулу диф уравнений запишем применительно для случая
влияния маневрированияи сделаем допущения : наложим корректирующие моменты; ![]() =0. Если искать мах значения инерционной
девиации которая наступит к концу маневра , то можно принебречь углом β=0
=0. Если искать мах значения инерционной
девиации которая наступит к концу маневра , то можно принебречь углом β=0
 - определяет мах значение
инерционной девиации на момент окончания маневра.
- определяет мах значение
инерционной девиации на момент окончания маневра.
В корректируемых компасах инерционная девиация не зависит от широты.
Способы снижения: 1. увеличение перида собственных
незатухающих колебаний  2. переход на
время маневра в режим гироазимута (Ау=0) 3. установка ограничителей в корпусе
индикатора горизонта 4. использование высоковязкой жидкости в корпус ИГ.
2. переход на
время маневра в режим гироазимута (Ау=0) 3. установка ограничителей в корпусе
индикатора горизонта 4. использование высоковязкой жидкости в корпус ИГ.
Достоинства:1. высокавтоматизированы 2. новый гироскоп – динамически настраиваемый 3. применяется кварцевый акселератор компенсационного типа 4. автомат переход в ГА при маневре 5. аккумулятор 6. сигналы коррекции могут вводится от GPS и лага (или в ручную) 7. двухпериодные : 15-20 мин-береговой; 350-360 минут – морской 8. температурный датчик определяющий и компенсирующий дрейф гироскопа 9. автоматический сигнал о выходе компаса из меридиана по любым причинам.
26. Электромагнитный лаг. Принцип действия индукционного лага.
Основной элемент лага – индукционный преобразователь он
находится в днище судна - это латунная трубка и в ней 2 электрода которые
соприкасаются с водой. От этих электродов идут провода. Также внутри латунной
трубки расположен электромагнит, обмотка которого питается переменным током с
частотой 50 Гц. Электромагнит создает переменное магнитное поле движущееся
вместе с судном относительно воды. Магнитная индукция этого поля определяется
выражением: ![]() ; где W=2пf (f –частота);
; где W=2пf (f –частота);  . В результате между электродами на
расстоянии l наводится ЭДС.
. В результате между электродами на
расстоянии l наводится ЭДС. 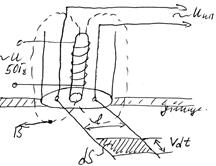 Электроды за
время dt со скоростью V
Электроды за
время dt со скоростью V ![]() протравливают
площадь dS. dS=lVdt ;
протравливают
площадь dS. dS=lVdt ; 
![]() - формула напряжения
индукционного преобразователя(полезный сигнал + квадратурная помеха).
- формула напряжения
индукционного преобразователя(полезный сигнал + квадратурная помеха). ![]() и
и ![]() -
конструктивные параметры индукционного преобразователя. Сигнал Uип снимается с электродов и передается в электрическую схему
лага для преобразования его в отсчет скорости судна. Квадратурная помеха
отфильтровывается. Таким образом индукц лаг измеряет скорость судна
относительно воды.
-
конструктивные параметры индукционного преобразователя. Сигнал Uип снимается с электродов и передается в электрическую схему
лага для преобразования его в отсчет скорости судна. Квадратурная помеха
отфильтровывается. Таким образом индукц лаг измеряет скорость судна
относительно воды.
Анализ точности измерения скорости.
Точность показания лага в большой степени зависит от места
установки инд преобразователя. Это объясняется прежде всего возникновением
вблизи поверхности коруса движущегося судна турбулентного слоя воды, имеющего
не одинаковую толщину и случайное поле скоростей частиц жидкости. Кроме того ,
распределение магнитной индукции В в объеме воды не одинаково по длине судна и
носит весьма сложный, не поддающийся аналитическому исследованию характер. Эти
и другие случайные факторы приводят к тому, что измеренная лагом скорость не
соответствует истинной скорости судна, причем связь между этими скоростями
имеет нелинейный характер. Т.о. инд лаг имеет погрешность , которая должна быть
компенсирована поправкой ![]() . В общем случае
поправка лага является некоторой функции скорости судна
. В общем случае
поправка лага является некоторой функции скорости судна ![]() .
Эту функцию можно представить в виде суммы трех составляющих
.
Эту функцию можно представить в виде суммы трех составляющих ![]() ( где а-постоянная, в – линейная а с
–нелинейная составляющие поправки). Постоянная составляющая поправка лага
вводится во время регулировки прибора в порту или в море при нулевой скорости и
штилевой погоде. После выполнения такой регулировки поправка лага имеет
линейную и нелинейную составляющие. Определение и ввод линейной составляющей
поправки лага выполняют по результатам испытания лага на мерной линии.
Нелинейная поправка лага вводится с помощью корректора. Данные для установки
корректора также определяют на мерной линии.
( где а-постоянная, в – линейная а с
–нелинейная составляющие поправки). Постоянная составляющая поправка лага
вводится во время регулировки прибора в порту или в море при нулевой скорости и
штилевой погоде. После выполнения такой регулировки поправка лага имеет
линейную и нелинейную составляющие. Определение и ввод линейной составляющей
поправки лага выполняют по результатам испытания лага на мерной линии.
Нелинейная поправка лага вводится с помощью корректора. Данные для установки
корректора также определяют на мерной линии.
Регулировку лага необхоимо производить ежегодно, так как в следствии обрастания корпуса судна изменение поправки лага за год может доходить до 2.5%.
Погрешность составляет 0.2 уз.
27. Доплеровские акустические лаги.
Принцип действия доплеровского акустического лага основан на эффекте Доплера, в соответствии с которым при относительном движении источника или приемника звуковых волн происходит изменение частоты принимаемых колебаний по отношению к излученным, причем это изменение, называемое доплеровским сдвигом, пропорционально скорости указанного относительного движения. При использовании доплеровского гидроакус лага и излучатель и приемник колебаний находятся на судне. Доплер лаг двухрежимный: 1. абсолютный (50 – 600 кГц) 2. относительный (4 МГц). В некоторых Доплер лагах встроен блок для измерения глубины – скомбинирован с эхолотом. Некоторые Доплер лаги специально рассчитаны для использования во время швартовки. В Доплер лагах есть наглядное представление о скорости судна: Vx, Vy, угл сноса, общий вектор.
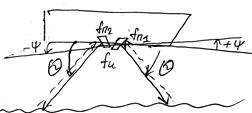
Уравнение однолучевого лага.
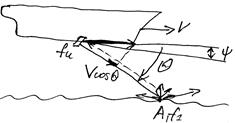 fu – излучаемая частота; А – работает на вторичный излучатель
на частоте f1; угол θ обычно равен 60 град.
Используется рассеянный сигнал , отраженный от грунта ( очень слабый)
fu – излучаемая частота; А – работает на вторичный излучатель
на частоте f1; угол θ обычно равен 60 град.
Используется рассеянный сигнал , отраженный от грунта ( очень слабый)  . Отраженный сигнал идет на встречу
судну и воспринимаемый сигнал
. Отраженный сигнал идет на встречу
судну и воспринимаемый сигнал  , отсюда
, отсюда  -это формула характеризует работу
однолучевого лага.
-это формула характеризует работу
однолучевого лага.
Двух лучевой Доплер лаг.
![]() ;
;  ;
;
- при отсутствии качки. Двухлучевая система обладает в 2 раза большей чувствительностью.
 - при качке. Погрешность
двухлучевого лага при качке
- при качке. Погрешность
двухлучевого лага при качке ![]() . В этом лаге
погрешность не зависит от угла θ.
. В этом лаге
погрешность не зависит от угла θ.
Методы повышения точности Доплер лагов.
1. гиростатические антенны- не участвуют в качке судна. 2. использование двух и много лучевых Доплер лагов. 3. спец конструкция антенны виде линейной решетки ( фазированная антенна – плоская, заподлицо с днищем судна, но создает наклонный луч под углом 60 град в нос и корму ) .
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.