- во-вторых, поворот платформы с гироскопом, относительно этой системы координат, не должен сопровождаться появлением «вредных» моментов, нарушающих устойчивость гироскопа и вызывающих, из-за несовершенства системы подвеса, дрейф.
Наилучшим образом указанная проблема решена в гироскопах класса ДНГ, которые применяются в гирокомпасах «Меридиан».
Ниже приводится краткое пояснение принципа действия упругого вращающегося подвеса гироскопа.
ДНГ – это гироскопическое устройство, состоящее из ротора (3), и системы подвеса (рис. 8, а) и состоящее из трёх групп связанных тел, а именно:
- ротора Р3, имеющего кинетический момент Нг;
- двух роторов Р1 и Р2 системы подвеса ротора Р3,
- четырёх пар торсионов Т1 ÷ Т4 системы подвеса, с помощью которых ротор 3 связан с осью собственного вращения ОХ.
Таким образом, в систему подвеса ротора Р3, входят, помимо четырёх пар упругих торсионов, два ротора подвеса Р1 и Р2 (в виде рамок) вращающихся с угловой скоростью ротора Р3.
На рисунке 8, б, эта система тел представлена в развёрнутом вдоль оси ОХ виде. Ротор Р3 с системой подвеса укреплён на валу, который приводится во вращение с заданной угловой скоростью электродвигателем 1 (рис. 9).
Если платформа 2, на которой установлен приводной двигатель, неподвижна по отношению к инерциальной системе координат, то главная ось ротора Р3 своей начальной ориентации менять не будет.
Другая особенность вращающегося упругого подвеса состоит в том, что ротор Р3, носитель кинетического момента Нг, при повороте платформы, на которой установлено гироскопическое устройство, находится под действием не только упругих моментов торсионов Т1 ÷ Т4 , но и моментов центробежных сил инерции двух роторов Р1 и Р2. Эти моменты, как и упругие моменты торсионов, являются функцией разности координат поворота платформы относительно гироскопа (α – αп) и (β – βп).
При некоторой, вполне определённой (оптимальной), угловой скорости собственного вращения ротора Р3, сумма упомянутых моментов обращается в ноль.
Гироскопическая система, в которой реализуется это явление, называется динамически настраиваемым гироскопом.
В случае полной реализации требований динамической настройки подвеса гироскопа, при малых отклонениях платформы гироскопа, на которой установлен ДНГ, сумма действующих на ротор Р3 моментов остаётся равной нулю.
Следовательно, и вектор Нг ротора Р3 будет сохранять начальную ориентацию по отношению к инерциальной системе координат.
2.1.2. Гироблок
При значительных углах поворота платформы вектор Нг сможет сохранить начальную ориентацию лишь в том случае, когда платформа будет стабилизирована по отношению к ротору Р3 с помощью высокочувствительных быстродействующих следящих систем, что и сделано в гирокомпасе «Меридиан».
Совокупность установленных на платформе приводного двигателя, ротора гироскопа и системы его подвеса представляет единую конструкцию, именуемую гироблоком (рис. 9).
 |
|||
 |
|||
Желательно, чтобы платформа, вне зависимости от того, работает гирокомпас или нет, была горизонтальна. Для этого центр тяжести платформы специально смещён по отношению к ц.т. гироблока по оси ОZп вниз. Чтобы платформа имела три степени свободы она подвешена на подшипниках в горизонтальной 4 и вертикальной 5 рамках карданного подвеса. Образованная конструкция является гиросекцией.
Гиросекция может поворачиваться вокруг оси ОZс, перпендикулярной палубе 8 судна на опорных подшипниках 7.
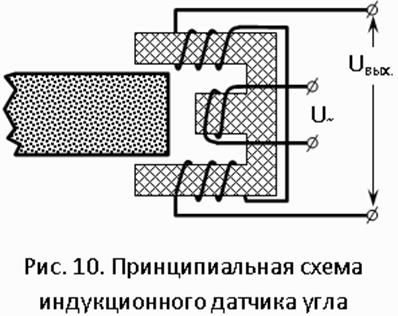
Кроме упомянутых двигателя 1, гироскопа 2, акселерометра 3 на платформе установлены сердечники двух датчиков углов ДУy и ДУz и двух датчиков моментов ДМу и ДМz. В качестве якоря этих четырёх электрических машин используется вращающийся ротор Р3 гироскопа.
Датчики углов ДУy и ДУz предназначены для измерения углов (α – αп) и (β – βп) рассогласования главной оси ОХ гироскопа и оси ОХп платформы по азимуту и высоте.
 Датчики моментов ДУy и ДУz служат для наложения на
гироскоп управляющих, корректирующих и компенсационных моментов.
Датчики моментов ДУy и ДУz служат для наложения на
гироскоп управляющих, корректирующих и компенсационных моментов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.