Данные, занесенные в таблицу, представим на одних осях координат в виде семейства графиков me(mz) при различных значениях Ky:
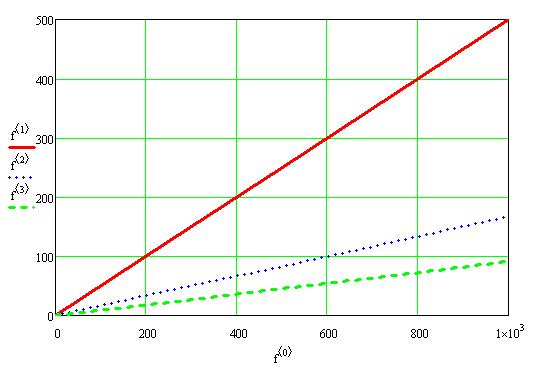
Рис. 24. Семейство графиков me(mz) при различных значениях Ky.
5.2. Исследование астатической системы.
5.2.1. Исследование астатической системы при постоянном уровне полезного сигнала.
При воздействии на вход системы полезного сигнала в виде ступенчатой функции сформируем временные диаграммы входного сигнала, выходного сигнала, ошибки работы системы. Схема приведена на рис. 25:

Рис. 25. Simulink – модель астатической системы (полезный сигнал в виде ступенчатой функции).

Рис. 26. Процессы в астатической системе при полезном сигнале в виде ступенчатой функции.
На основе собранной модели определим количественную зависимость установившейся ошибки me работы системы от величины входного сигнала mx при нескольких значениях коэффициента усиления системы Ky. Результаты измерений занесем в таблицу:
Таблица 3. Ошибка me при воздействии полезного сигнала mx.
|
mx, мВ |
0 |
50 |
100 |
150 |
200 |
|
|
|
Ky = 1 |
0 |
0.02466 |
0.01839 |
0.006258 |
0.006153 |
|
Ky = 5 |
0 |
0.001151 |
0.02302 |
0.003453 |
0.004605 |
|
|
Ky = 10 |
0 |
0.03512 |
0,00353 |
0,003415 |
0,007059 |
|
Данные, занесенные в таблицу, представим на одних осях координат в виде семейства графиков me(mx) при различных значениях Ky:
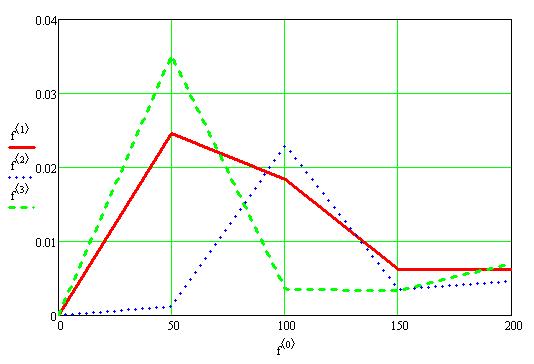
Рис. 27. Семейство графиков me(mx) при различных значениях Ky.
5.2.2. Исследование астатической системы с линейно изменяющимся уровнем полезного сигнала.
Сформируем на входе системы линейно нарастающий во времени сигнал и визуально определим вид временной зависимости установившейся ошибки системы при значениях коэффициента усиления Ky = 1, Ky = 5, Ky = 10. Для этого будем использовать следующую схему:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.