5.1.2. Исследование статической системы с линейно изменяющимся уровнем полезного сигнала.
Сформируем на входе системы линейно нарастающий во времени сигнал и визуально определим вид временной зависимости установившейся ошибки системы при значениях коэффициента усиления Ky = 1, Ky = 5, Ky = 10. Для этого будем использовать следующую схему:
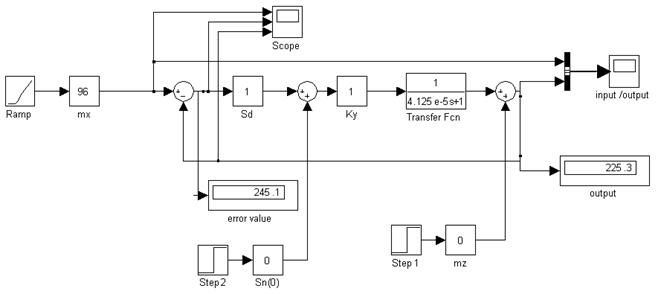
Рис. 18. Simulink – модель статической системы (полезный сигнал в виде линейно изменяющейся функции).
Результаты зафиксируем в виде осциллограмм, отражающих основные характерные особенности процессов (все в одном масштабе по оси времени 0 – 6e-4 с.):
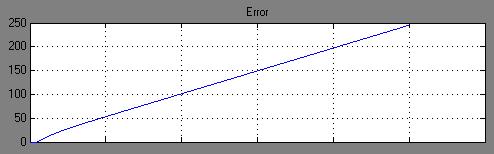
Рис. 19. Временная зависимость установившейся ошибки системы при значении коэффициента усиления Ky = 1.

Рис. 20. Временная зависимость установившейся ошибки системы при значении коэффициента усиления Ky = 5.
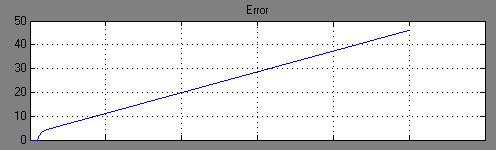
Рис. 21. Временная зависимость установившейся ошибки системы при значении коэффициента усиления Ky = 10.
5.1.3. Исследование статической системы с постоянным уровнем помехи.
Отключим входной полезный сигнал mx (сделаем его равным нулю) и подадим в систему мешающее воздействие mz в виде ступенчатой функции:
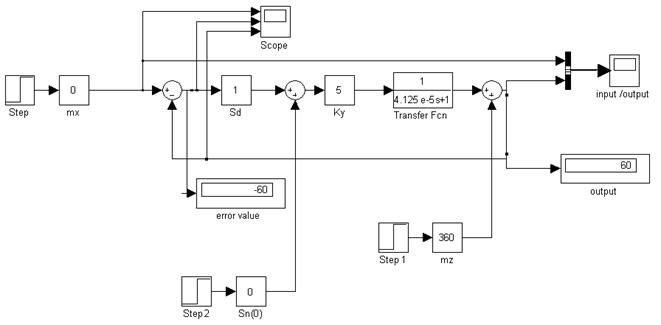
Рис. 22. Simulink – модель статической системы (помеха постоянного уровня).
Сформируем диаграммы входного воздействия, выходного сигнала, ошибки работы системы:

Рис. 23. Временные диаграммы входного воздействия, выходного сигнала, ошибки работы системы.
На основе собранной модели экспериментально определим количественную зависимость установившейся ошибки me работы системы от величины помехи mz при нескольких значениях коэффициента усиления системы Ky. Результаты измерений занесем в таблицу:
Таблица 2. Ошибка me при воздействии помехи mz.
|
mz, мВ |
0 |
250 |
500 |
750 |
1000 |
|
|
|
Ky = 1 |
0 |
125 |
250 |
375 |
500 |
|
Ky = 5 |
0 |
41.67 |
83.33 |
125 |
166.7 |
|
|
Ky = 10 |
0 |
22.73 |
45.45 |
68.18 |
90.91 |
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.