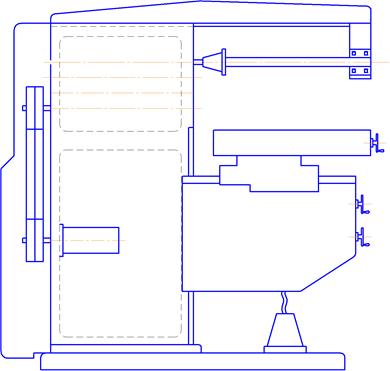
Предварительный схематичный общий вид горизонтально фрезерного станка.
![]() 1 Кинематический расчет привода
1 Кинематический расчет привода
Цель расчета – разработка структуры привода главного движения (ПГД), распределение передаточных отношений между кинематическими группами и их оптимизация с последующим подбором числа зубьев колес и шестерен всех передач и диаметральных размеров шкивов. Завершается расчет построением наиболее рационального варианта картины частот вращения и кинематической схемы привода.
Перед началом расчета дополнительному определению подлежат следующие недостающие исходные данные:
1) мощность привода NП вычисляется по формуле
 , (1.1) где
h – коэффициент полезного
действия механической части, который на стадии разработки технического
предложения принимают равным 0,75…0,85;
, (1.1) где
h – коэффициент полезного
действия механической части, который на стадии разработки технического
предложения принимают равным 0,75…0,85;
N – эффективная мощность резания, кВт.
 кВт
кВт
2) минимальная частота вращения nmin находится по выражению
 , (1.2)
, (1.2)
где nmax – максимальная частота вращения, мин-1;
DП – общий диапазон регулирования скорости.
 мин-1
мин-1
3) определятся число ступеней скорости Z привода
 , (1.3)
, (1.3)
где j – знаменатель геометрического ряда частот вращения, значение которого в соответствии с заданной допустимой потерей скорости равно 1.41.
По рассчитанным данным (NП, Z), а также в соответствии с заданной максимальной частотой вращения (nmax) по справочнику [1] выбирается двухскоростной (с целью упрощения коробки скоростей) асинхронный электродвигатель 4A132М4У3. Основные данные электродвигателя приведены в таблице 1.1.
Таблица 1.1 – Основные технические данные двигателя 4А132М4У3
|
Синхронная частота n, мин-1 |
Мощность N, кВт |
КПД h, % |
Скольжение S, % |
|
1500 |
11 |
82 |
3.1 |
|
3000 |
12,5 |
77 |
3.1 |
Тип кинематической структуры: множительная с двухскоростным электродвигателем. Структурная формула привода определяется следующим образом:
![]() , (1.4)
, (1.4)
4) Определяется x – характеристика группы, которая численно равна количеству ступеней скорости, получаемых за счет переключения предшествующих групп:
![]()
5) Выписываются стандартные значения частот вращения от nmin до nmax:
125; 180; 250; 355; 500; 710; 1000; 1400;
На основе полученных данных строится картина частот вращения. На рисунке 1.1 представлена КЧВ, а на рисунке 1.3 кинематическая схема привода.
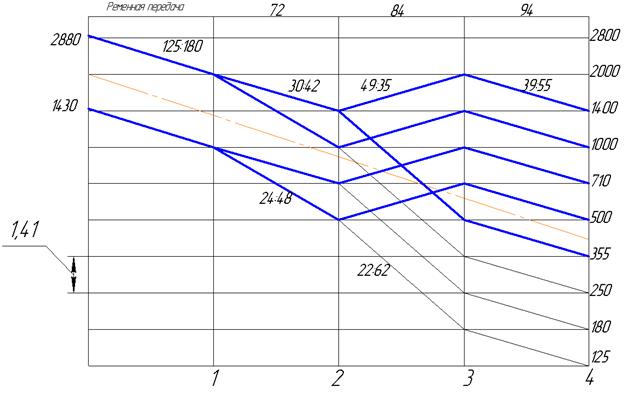
![]() Рисунок 1.1КЧВ
Рисунок 1.1КЧВ
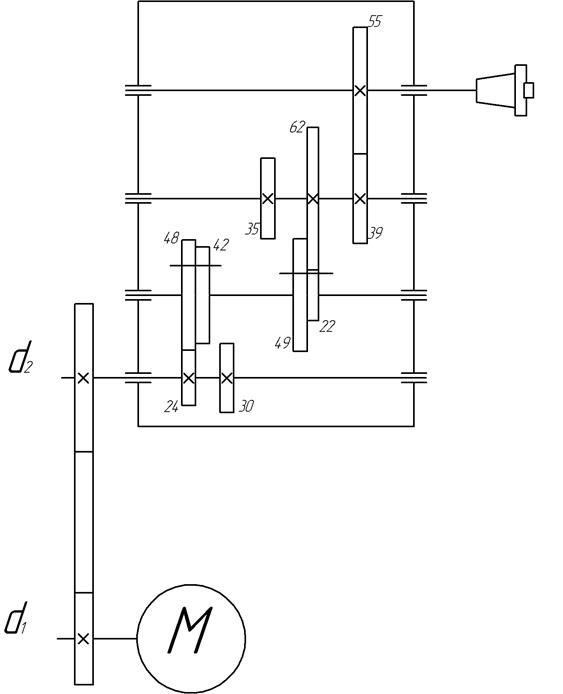
![]() Рисунок 1.3 Кинематическая схема привода
Рисунок 1.3 Кинематическая схема привода
Вычисляются фактические частоты вращения шпинделя njф, и определяются относительные погрешности dnj фактических частот вращения шпинделя, выраженные в процентах, которые затем сравниваются с допустимыми на основе зависимости
 , (1.5)
, (1.5)
где [dn] = ±10(j – 1) = ±10(1.41-1) = ±4.1;
 .
.
Результаты вычислений других погрешностей представлены в таблице 1. 2.
|
Стандартные частоты вращения шпинделя nj, мин-1 |
Фактические частоты вращения шпинделя njф, мин-1 |
Относительная погрешность dnj, % |
|
125 |
123,9 |
0,87 |
|
180 |
177 |
1,66 |
|
250 |
249,54 |
0,18 |
|
355 |
356,49 |
-0,41 |
|
500 |
488,86 |
2,2 |
|
710 |
698,37 |
1,64 |
|
1000 |
984,55 |
1,54 |
|
1400 |
1406,5 |
-0,46 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.