Передаточная функция разомкнутой системы определится:
![]() (8.6)
(8.6)
Отсюда действительная передаточная функция замкнутой системы определится:
 (8.7)
(8.7)
Прямой канал:

![]()
![]()
![]()
![]()
Приняв за условие:![]()
![]()
![]()
![]() , получим:
, получим:
![]() Ом
Ом ![]() Ф
Ф ![]() Ом
Ом ![]() Ф
Ф
Канал
ОС: 
![]()
![]()
![]() с
с
![]() Ом
Ом
![]() Ф.
Ф.
4.1.1. САУ с последовательной коррекцией.
Передаточная функция скорректированной системы для последовательной коррекции:

Для последовательной коррекции:
>> W=tf(97.9,[0.03 25.0012 1])
Transfer function:
97.9
-------------------
0.03 s^2 + 25 s + 1
>> Wz=feedback(W,1)
Transfer function:
97.9
----------------------
0.03 s^2 + 25 s + 98.9
>> step(Wz)
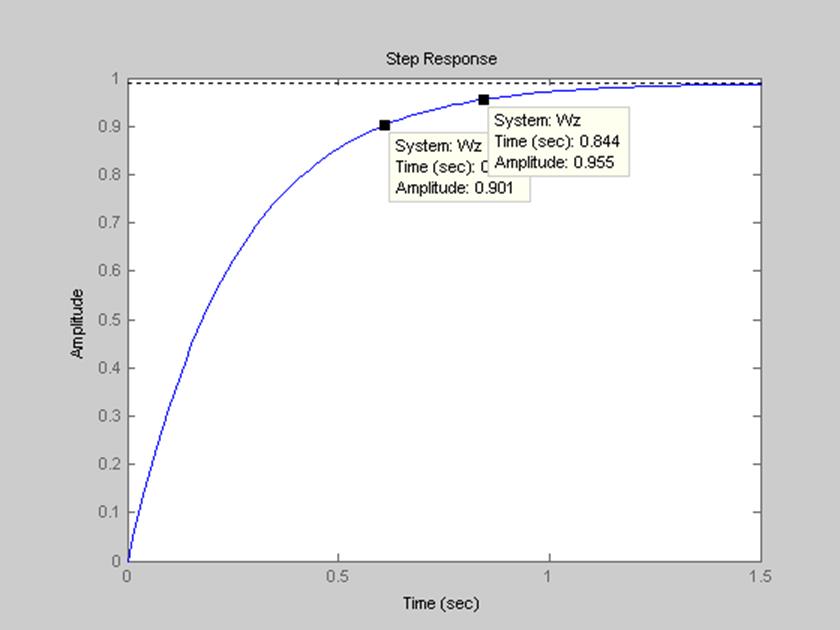
Рисунок 17 – Переходная характеристика скорректированной системы для последовательной коррекции
Время переходного процесса:
t=0,844с;
Время первого согласования:
t=0,608c;
4.1.2. САУ с параллельной коррекцией.
Передаточная функция скорректированной системы для параллельной коррекции:

>> W1=tf([0.1175 101.816],[0.030000551 25.00173244 1.047736])
Transfer function:
0.1175 s + 101.8
-----------------------
0.03 s^2 + 25 s + 1.048
>> margin(W1)
>> Wz1=feedback(W1,1)
Transfer function:
0.1175 s + 101.8
--------------------------
0.03 s^2 + 25.12 s + 102.9
>> step(Wz1)
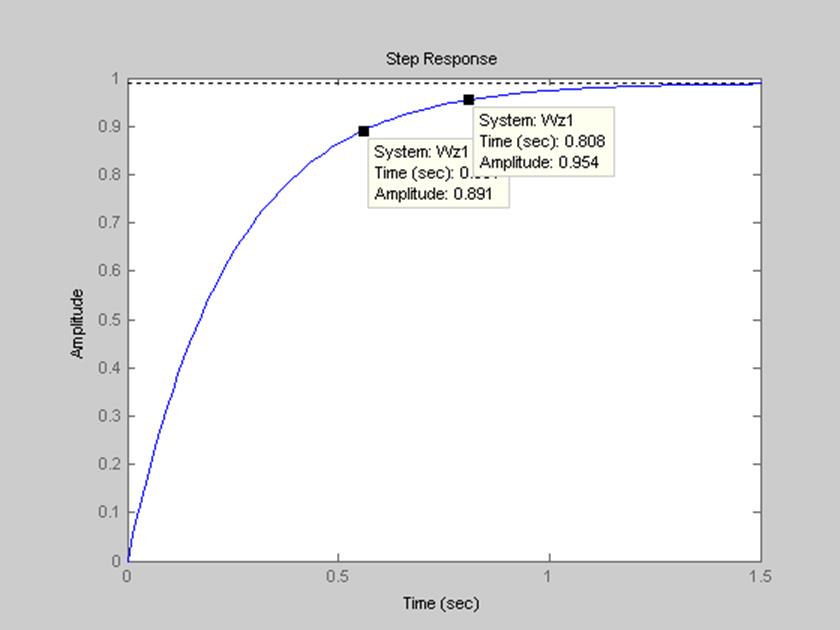
Рисунок 18 – Переходная характеристика скорректированной системы для параллельной коррекции
Время переходного процесса:
t=0,808c;
Время первого согласования:
t=0,561c;
4.1.3. САУ, построенная в соответствии с принципами структурно – параметрической оптимизации.
Для САУ, построенной в соответствии с принципами структурно – параметрической оптимизации:
Действительная передаточная функция замкнутой системы:

>> Wdz=tf(0.11817,[0.000000003 0.000005875 0.002496 0.091])
Transfer function:
0.1182
------------------------------------------------
3e-009 s^3 + 5.875e-006 s^2 + 0.002496 s + 0.091
>> step(Wdz)
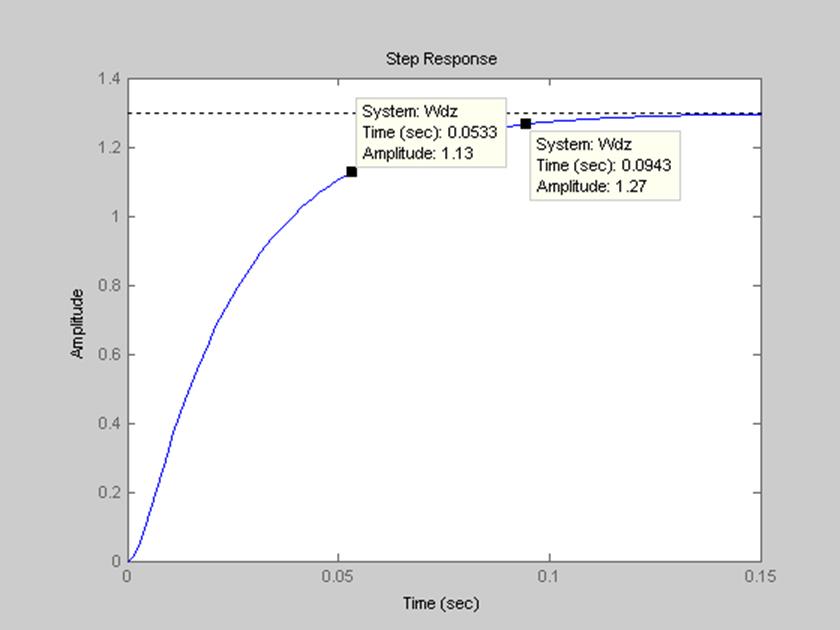
Рисунок 19 – Переходная характеристика для САУ, построенной в соответствии с принципами структурно – параметрической оптимизации
Время переходного процесса:
t=0,0943c;
Время первого согласования:
t=0,0533c;
В курсовой работе мы провели анализ и синтез исходной и скорректированной системы автоматического управления.
При синтезе корректирующего устройства использовали различные виды включения корректирующих устройств: последовательного, параллельного, а также проводили структурно – параметрический синтез системы. Нашли схемные реализации корректирующих устройств, их параметры. При определении показателей качества переходных процессов видно, что для последовательной и параллельной коррекции, а также структурно – параметрической оптимизации, время переходного процесса и время первого согласования удовлетворяют исходным показателям качества.
Заданное время переходного процесса:
t=0,6c;
Для последовательной коррекции:
Время переходного процесса:
t=0,844с;
Время первого согласования:
t=0,602c;
Для параллельной коррекции:
Время переходного процесса:
t=0,808c;
Время первого согласования:
t=0,561c;
Для структурно – параметрической оптимизации:
Время переходного процесса:
t=0,0943c;
Время первого согласования:
t=0,0533c;
Список используемой литературы:
1.) Под редакцией А.В. Нетушила, Теория автоматического управления. М: - Высшая школа 1976 г – 400с.
2.) В. А. Лукас, Теория автоматического управления. М: - высшая школа 1990 г – 415с.
3.) В. А. Бесекерский, А. Н. Герасимов, Л. Ф. Порфирьеф, Е. А. Фабрикант, С. М. Фёдоров, В. И. Цветков, Сборник задач по теории автоматического управления. М: - Высшая школа 1972 г -567с.
4.) И. М. Тетельбаум, Ю. Р. Шнейдер, практика аналогового моделирования динамических систем. М: - Высшая школа 1987 г – 383с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.