Из номограммы:
При перерегулировании, равном ![]()
![]()
![]()
При ![]() из
номограммы находим
из
номограммы находим ![]()
![]() Отсюда находим частоту среза wср
Отсюда находим частоту среза wср
Среднечастотная асимптота желаемой ЛАХ проводится через точку wср с наклоном – 20дб/дек. При большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование.
Протяженность среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. По найденному значению Pmax с помощью кривых (рисунок 7) определяем избыток фазы и предельные значения логарифмических амплитуд.
Lм=16дб/дек, ![]() .
.
Избыток фазы должен быть обеспечен на участке характеристики Lж(w) для которой справедливо:
Lм > Lж(p) > -Lм;
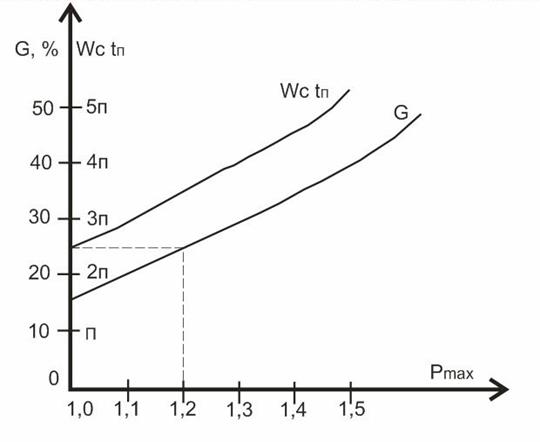
Рисунок 7
Этот участок охватывает среднечастотную асимптоту.
Отмечаем на среднечастотной асимптоте точки, соответствующие значениям
Lм и –Lм. Отмечаем на оси частот частоту среза wср и проводим через эту точку среднечастотную часть желаемой характеристики с наклоном - 20 дб/дек.
Сопряжение среднечастотной части характеристики с низкочастотной,
как видно из рис. 6, происходит при частоте ![]()
Высокочастотную асимптоту начинаем из точки ЛАХ, соответствующей
частоте ![]()
Высокочастотная асимптота желаемой ЛАХ мало влияет на свойства системы, поэтому её выбираем так, чтобы она совпадала по наклону с высокочастотной асимптотой Lнск(w).
3.) На основании желаемой и исходной ЛАХ системы определяем ЛАХ последовательного корректирующего устройства.
Для определения ЛАХ последовательного корректирующего устройства Lк(w) необходимо вычесть из Lж(w) Lнск(w).
Lж(w) – Lнск(w)=Lк(w);
 - передаточная функция
желаемой ЛАХ;
- передаточная функция
желаемой ЛАХ;
4.) По построенной ЛАХ определяем передаточную функцию корректирующего устройства.
ЛАХ последовательного корректирующего устройства изображена на рис.8. (приложение 1).
При этом ![]()
![]()
![]()
![]()
Следовательно ![]()
![]()
Передаточная функция корректирующего устройства определится:
![]()
![]()
 (6.1)
(6.1)
По полученной передаточной функции корректирующего устройства подберём схемную реализацию корректирующего устройства.
(6.2)
Рисунок 9 – Схемная реализация последовательно корректирующего устройства
Рассчитываем параметры данной схемы:
![]()
![]()
![]()
![]()
![]()
![]()
![]() , получим:
, получим:
![]() Ом
Ом ![]() Ом
Ом ![]() Ф
Ф ![]() Ф
Ф
![]()
![]()
![]()
![]()
Приняв за условие: ![]()
![]()
![]()
![]() получим:
получим:
![]() Ом
Ом ![]() Ом
Ом ![]() Ф
Ф ![]() Ф
Ф
![]()
![]()
Передаточная функция разомкнутой скорректированной системы определится:
 (6.3)
(6.3)
При синтезе параллельного корректирующего устройства необходимо выбрать звено, охватываемое отрицательной обратной связью (ООС).
В качестве такого звена выбираем 
Схема включения параллельно корректирующего устройства имеет вид:
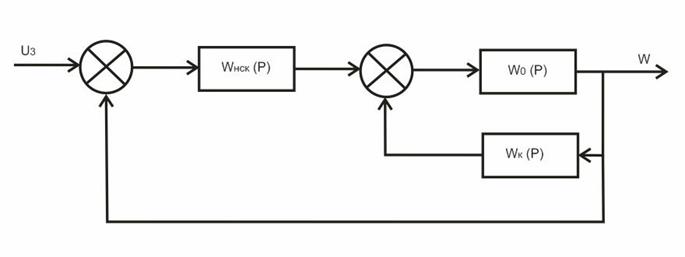
Рисунок 10 – Схема включения параллельно корректирующего устройства
Передаточная функция нескорректированной системы определится:
 (6.4)
(6.4)
![]()
![]()
![]() - передаточная функция охваченного звена.
- передаточная функция охваченного звена.
1.) Строим ЛАХ нескорректированной системы Lнск(w)
Kу=2132,84;
Проводим прямую, параллельную оси частот, ордината которой равна:
![]()
2.) Строим желаемую ЛАХ Lж(w).
Низкочастотная асимптота определяет статические свойства системы. Низкочастотной асимптотой желаемой ЛАХ является низкочастотная асимптота Lнск(w).
Среднечастотная асимптота ЛАХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы.
Построение среднечастотной асимптоты желаемой ЛАХ начинаем с выбора частоты среза wср используем номограмму, составленную В.В.Солодовниковым. Она определяет зависимость перерегулирования и времени регулирования от максимума вещественной частотной характеристики замкнутой системы.
Из номограммы:
При перерегулировании, равном ![]()
![]()
![]()
При ![]() из
номограммы находим
из
номограммы находим ![]()
![]() Отсюда находим частоту среза wср
Отсюда находим частоту среза wср
Среднечастотная асимптота желаемой ЛАХ проводится через точку wср с наклоном – 20дб/дек. При большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.