![]() (4.1)
(4.1)
При К > ККР система будет неустойчивой (К < 6,05 – система устойчива).
При
значении коэффициента передачи разомкнутой системы, вычисленном в пункте 1.4 (![]() ) система будет неустойчива. Значит для
достижения заданной точности регулирования необходимо скорректировать систему
так, чтобы она была устойчивой.
) система будет неустойчива. Значит для
достижения заданной точности регулирования необходимо скорректировать систему
так, чтобы она была устойчивой.
Построим диаграмму Боде для разомкнутой системы:
Передаточная функция разомкнутой САУ:

Построение диаграммы Боде для разомкнутой САУ:
>> margin(W)
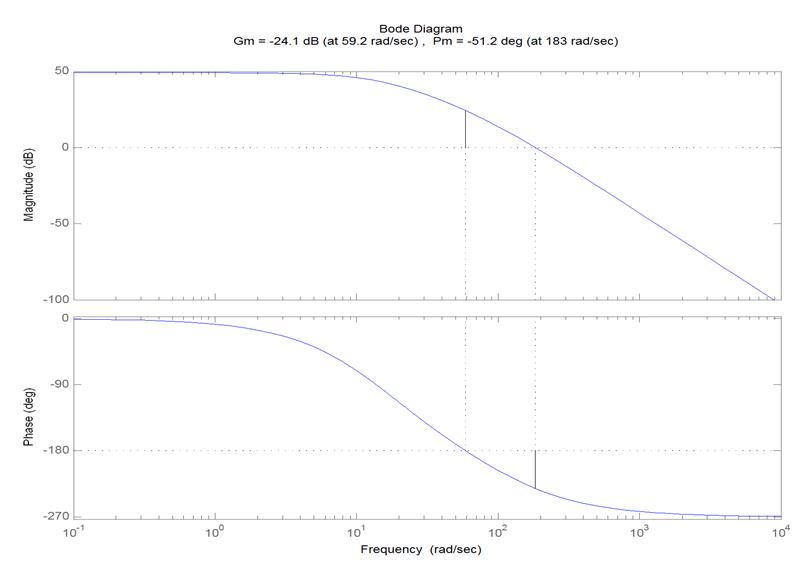
Рисунок 5 – Диаграмма Боде для разомкнутой САУ
Данная диаграмма подтверждает, что система является неустойчивой (в зоне частот до частоты среза ЛАХ пересекает ось абсцисс только один раз в положительном направлении).
По ЛАХ определяем критический коэффициент передачи разомкнутой системы:
 (5.1)
(5.1)
Данный критический коэффициент усиления разомкнутой системы совпадает с коэффициентом, найденным по корневому годографу. Система устойчива при К < 6,107
Определим частоту среза для данной САУ:
![]() рад/с
рад/с
По виду ЛАХ можно определить:
1) система статическая (первоначальный наклон характеристики равен нулю);
2) наклон характеристики в зоне частоты среза: -24.1/((183-59.2)/10) = - 1.946Б/дек =-19.46дБ/дек (так как данный наклон одинаков для ЛАХ в зоне 1 декады от частоты среза, то система не будет иметь колебательности);
3) система имеет отрицательный запас устойчивости по фазе -51.2 и по амплитуде (-24.1).
Система является неустойчивой. Для того, чтобы система была устойчивой требуется снизить коэффициент передачи разомкнутой системы или ввести корректирующие звенья.
Наиболее лучшим способом придания системе автоматического управления необходимых динамических свойств является введение в нее дополнительного элемента. Он корректирует свойства исходной системы и называется корректирующим элементом или устройством.
Введение корректирующего устройства в систему автоматического регулирования необходимо для обеспечения требуемых динамических свойств этой системы. Иногда корректирующее устройство изменяет нужным образом и статические свойства системы.
Корректирующие устройства включаются в системе автоматического управления различно. Возможно последовательное, параллельное и прямое параллельное включение корректирующего устройства.
Для обеспечения требуемых показателей качества синтезируем последовательное корректирующее устройство.
Синтез корректирующего устройства будем производить по логарифмическим амплитудно - частотным характеристикам.
Передаточная функция разомкнутой системы автоматического управления имеет вид:
 , где T1=Tтп=0,01, T2=TяTм=0,0012, T3=Tм=0,04;
, где T1=Tтп=0,01, T2=TяTм=0,0012, T3=Tм=0,04;
1.) Построим ЛАХ исходной нескорректированной системы Lнск(w) с учётом требуемого коэффициента усиления системы в разомкнутом состоянии Kтр.
Kтр=97,9 - требуемый коэффициент усиления.
Проводим прямую, параллельную оси частот, ордината которой равна:
![]()
2.) По заданным показателям качества – перерегулированию, времени переходного процесса - строим желаемую ЛАХ. Желаемой ЛАХ называют асимптотическую ЛАХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства.
Низкочастотная асимптота определяет статические свойства системы. Низкочастотной асимптотой желаемой ЛАХ является низкочастотная асимптота Lнск(w).
Среднечастотная асимптота ЛАХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы.
Построение среднечастотной асимптоты желаемой ЛАХ начинаем с выбора частоты среза wср используем номограмму, составленную В.В.Солодовниковым. [1]. Она определяет зависимость перерегулирования и времени регулирования от максимума вещественной частотной характеристики замкнутой системы.
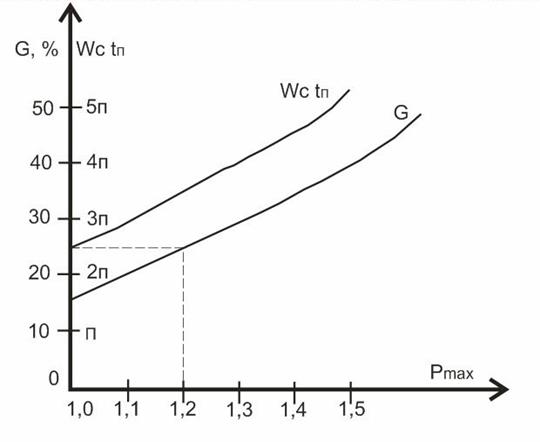
Рисунок 6 – Кривые для определения времени переходного процесса и перерегулирования для вещественной частотной характеристики, имеющей максисмум
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.