Системы с переменной структурой.
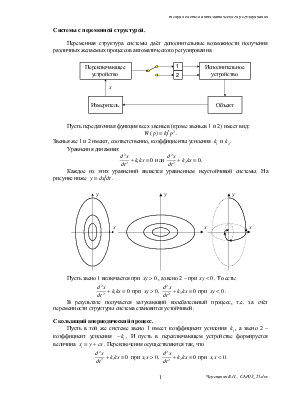
Переменная структура системы даёт дополнительные возможности получения различных желаемых процессов автоматического регулирования.
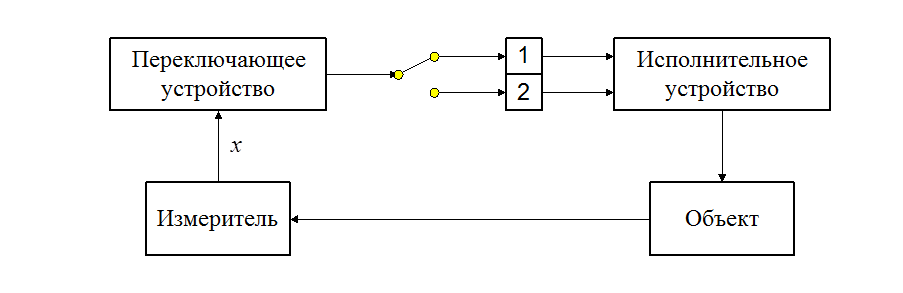
Пусть передаточная функция всех звеньев (кроме звеньев 1 и 2) имеет вид:
![]() .
.
Звенья же 1 и 2 имеют,
соответственно, коэффициенты усиления ![]() и
и ![]() .
.
Уравнения динамики:
 или
или  .
.
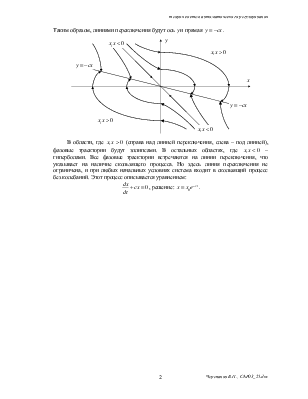
Каждое из этих
уравнений является уравнением неустойчивой системы. На рисунке ниже ![]() .
.
Пусть звено 1
включается при ![]() , а звено 2 – при
, а звено 2 – при ![]() . То есть:
. То есть:
при ![]() , при
, при ![]() .
.
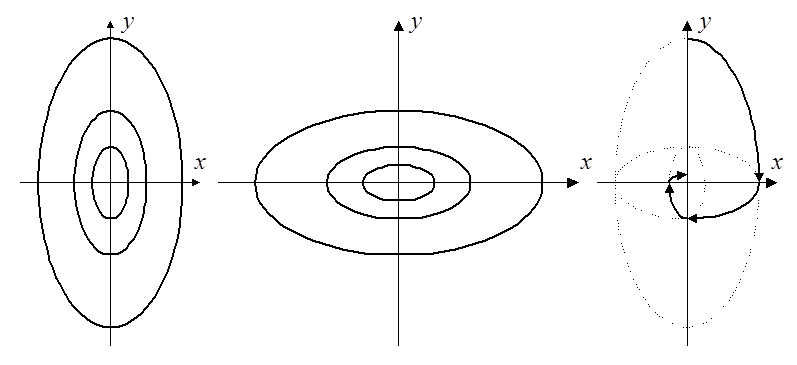
В результате получается затухающий колебательный процесс, т.е. за счёт переменности структуры система становится устойчивой.
Скользящий апериодический процесс.
Пусть в той же
системе звено 1 имеет коэффициент усиления ![]() , а
звено 2 – коэффициент усиления
, а
звено 2 – коэффициент усиления ![]() . И пусть в
переключающем устройстве формируется величина
. И пусть в
переключающем устройстве формируется величина ![]() .
Переключения осуществляются так, что
.
Переключения осуществляются так, что
при ![]() , при
, при ![]() .
.
Таким образом, линиями
переключения будут ось y и прямая ![]() .
.
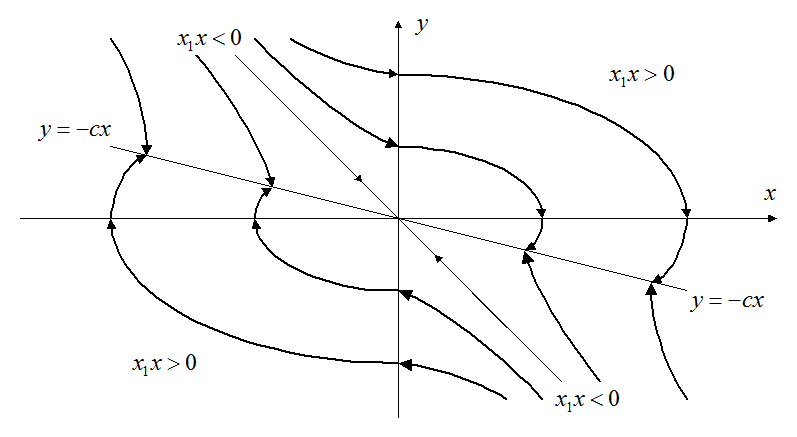
В области, где ![]() (справа над линией переключения, слева –
под линией), фазовые траектории будут эллипсами. В остальных областях, где
(справа над линией переключения, слева –
под линией), фазовые траектории будут эллипсами. В остальных областях, где ![]() – гиперболами. Все фазовые траектории
встречаются на линии переключения, что указывает на наличие скользящего
процесса. Но здесь линия переключения не ограничена, и при любых начальных
условиях система входит в скользящий процесс без колебаний. Этот процесс
описывается уравнением:
– гиперболами. Все фазовые траектории
встречаются на линии переключения, что указывает на наличие скользящего
процесса. Но здесь линия переключения не ограничена, и при любых начальных
условиях система входит в скользящий процесс без колебаний. Этот процесс
описывается уравнением:
 , решение:
, решение: ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.