Частотные критерии качества [1, с.233].
Запас устойчивости
можно определять по удалению амплитудно-фазовой характеристики разомкнутой
системы от точки (![]() ). Для этой цели вводятся понятия
запаса устойчивости по амплитуде и запаса устойчивости по фазе.
). Для этой цели вводятся понятия
запаса устойчивости по амплитуде и запаса устойчивости по фазе.
Удобнее, однако, определять запас
устойчивости по показателю колебательности ![]() .
.
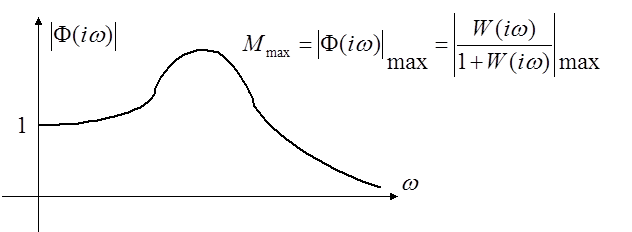
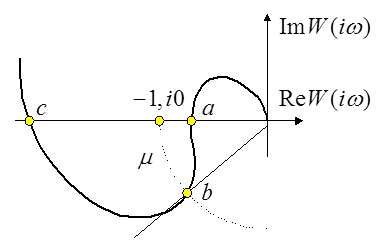
Показатель колебательности замкнутой системы можно определить по виду амплитудно-фазовой характеристике разомкнутой системы. Рассмотрим уравнение
 .
.
Сделаем подстановки ![]() ,
, ![]() . Тогда
. Тогда
 .
.
Возведём в квадрат и преобразуем:
![]() , где
, где  ,
,  .
.
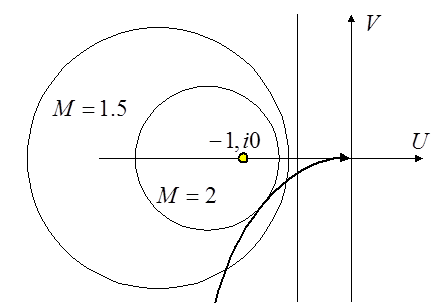
Слева – уравнение окружности с
радиусом R и с центром, смещённым влево от
начала координат на С. Задаваясь М от 0 до ![]() , строят семейство таких окружностей. При
, строят семейство таких окружностей. При ![]() окружность вырождается в прямую линию,
параллельную оси ординат, проходящую через точку (
окружность вырождается в прямую линию,
параллельную оси ординат, проходящую через точку (![]() ). При
). При ![]() окружность вырождается в точку (
окружность вырождается в точку (![]() ). При
). При ![]() окружность
вырождается в точку (
окружность
вырождается в точку (![]() ).
).
Повышение точности систем автоматического регулирования [1, c.246].
Общие методы:
1) увеличение коэффициента усиления разомкнутой цепи,
2) повышение степени астатизма,
3) применение регулирования по производным от ошибки.
При повышении коэффициента усиления система, как правило, приближается к колебательной границе устойчивости. Следует одновременно повышать запас устойчивости, что делается с помощью различных корректирующих звеньев.
Применение изодромных устройств.
Можно повысить порядок астатизма без заметного ухудшения запаса устойчивости. Передаточная функция изодромного устройства:
 , здесь
, здесь ![]() .
.
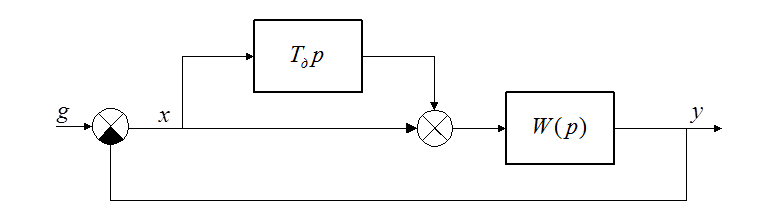
Структурная схема замкнутой системы:
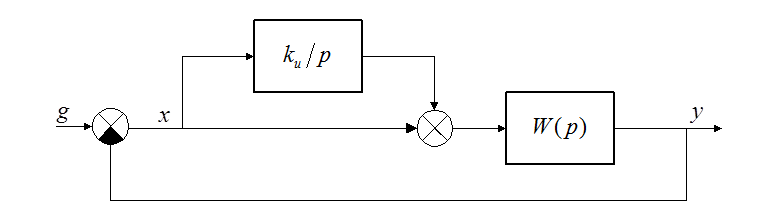
Выше были рассчитаны коэффициенты ошибок для системы, имеющей в разомкнутом состоянии передаточную функцию
 .
.
Напомним процедуру получения коэффициентов ошибок.
Передаточная функция по ошибке:
 .
.
Деление полинома на полином уголком:
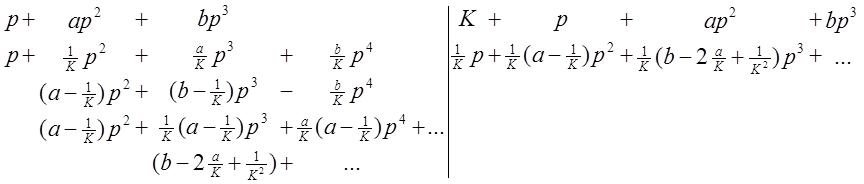
Теперь  .
.
Здесь ![]() – так
называемая добротность системы по ускорению.
– так
называемая добротность системы по ускорению.
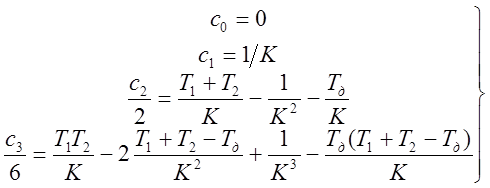
Коэффициенты
ошибок получаются путём разложения передаточной функции замкнутой системы по
ошибке ![]() . В результате:
. В результате:
 .
.
Устойчивость.
Характеристическое уравнение:
![]() .
.
Критерий Рауса-Гурвица:
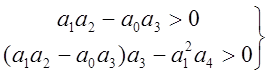
Второе неравенство более суровое:
![]() .
.
Иначе:
 .
.
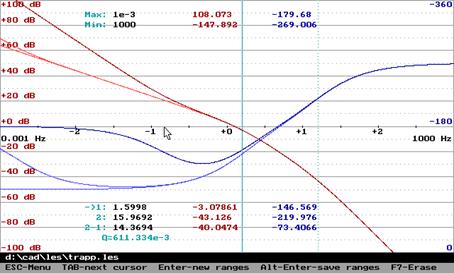
Эффект изодромного устройства изображён с помощью логарифмических частотных характеристик ниже.
Регулирование по производным от ошибки.
Передаточная функция дифференцирующего элемента:
![]() .
.
Для той же передаточной функции разомкнутой системы, что и в примере выше, с учётом дифференцирующего звена имеем
 .
.
Коэффициенты ошибок получаются путём разложения передаточной функции замкнутой системы по ошибке
 :
:
Видно, что при
соответствующем выборе величины постоянной времени ![]() можно
занулить коэффициенты ошибки
можно
занулить коэффициенты ошибки ![]() или
или ![]() . Применяя два дифференцирующих звена,
можно занулить их одновременно. Заметим, что на коэффициент
. Применяя два дифференцирующих звена,
можно занулить их одновременно. Заметим, что на коэффициент ![]() дифференцирующее звено не влияет.
дифференцирующее звено не влияет.
Наиболее эффективным является одновременное применение изодромных устройств и дифференцирующих звеньев.
Комбинированное управление [1, с. 254].
Структурная схема системы с комбинированным управлением:
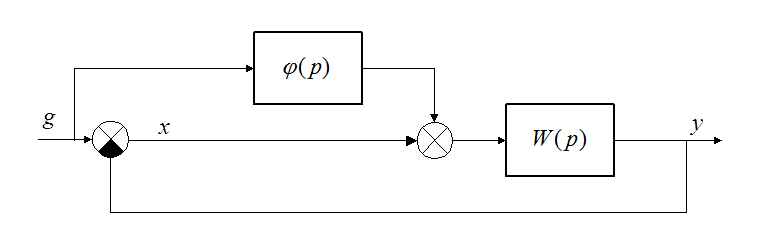
Здесь наряду с регулирование по ошибке используется регулирование по задающему воздействию. Регулируемая величина определяется выражением:
 .
.
Видно, что введение регулирования по задающему воздействию не меняет характеристического уравнения системы, работающей по отклонению.
Очевидно, что
если ![]() , то имеет место так называемое условие полной
инвариантности системы регулирования. Т.е. эквивалентная передаточная
функция по ошибке
, то имеет место так называемое условие полной
инвариантности системы регулирования. Т.е. эквивалентная передаточная
функция по ошибке
 .
.
На практике полная инвариантность невозможна.
Произведём разложение в ряд:
 .
.
Использованием конечного числа членов полученного ряда достигается частичная инвариантность. Так, введением первой производной от задающего воздействия в системе с астатизмом первого порядка можно получить равной нулю скоростную ошибку, т.е. повысить степень астатизма.
Прежде рассмотрения некоторых примеров, рассмотрим систему, имеющую следующую структуру (сигнал регулирования по задающему воздействию подан в некоторую точку внутри канала регулирования):
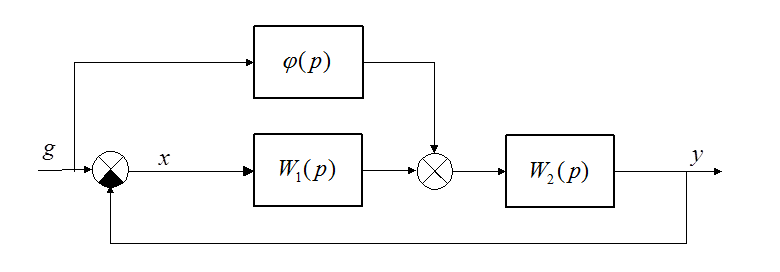
Эквивалентные передаточные функции замкнутой системы и по ошибке:
 ,
,  .
.
Эквивалентная передаточная функция разомкнутой системы:
 .
.
Пример. Следящая система.
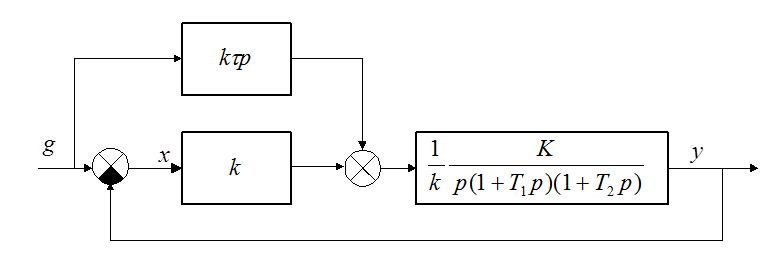
Эквивалентная передаточная функция по ошибке:
 .
.
Скоростная ошибка будет равна
нулю, если ![]() . При этом эквивалентная передаточная
функция разомкнутой системы будет соответствовать астатизму второго порядка:
. При этом эквивалентная передаточная
функция разомкнутой системы будет соответствовать астатизму второго порядка:
 , здесь
, здесь  ,
,  .
.
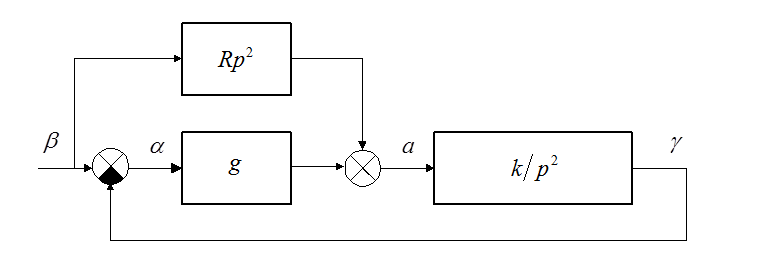
Пример. Инерционная вертикаль.
На перемещающейся горизонтально по поверхности земли платформе установлен измеритель горизонтального ускорения:
![]() .
.
Здесь ![]() –
наклон платформы (ошибка вертикали), R – радиус
Земли,
–
наклон платформы (ошибка вертикали), R – радиус
Земли, ![]() – угол, соответствующий пройденному пути
– угол, соответствующий пройденному пути ![]() . Двойной интеграл от этого ускорения
поворачивает платформу на угол
. Двойной интеграл от этого ускорения
поворачивает платформу на угол ![]() .
.
Система стабилизации вертикали описывается следующей структурной схемой:
Передаточная функция по ошибке (вертикали):
 .
.
Всё это справедливо, если выполнены нулевые начальные условия – отсутствует свободное начальное движение вертикали. В самом деле, характеристическое уравнение имеет вид:
 , корни:
, корни:  .
.
Здесь ![]() –
частота незатухающих колебаний вертикали, которой соответствует период
–
частота незатухающих колебаний вертикали, которой соответствует период ![]() , называемый периодом Шулера.
, называемый периодом Шулера.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.